Public Types | |
| typedef Int | Attributes |
| typedef Int | VisualType |
| enum | AttributeFlags { ShowAxes = 1, ShowBounds = 2, ShowCollisions = 4, ShowCollisionModel = 8, ShowCollisionDetection = 16, ShowEdges = 32, ShowNormals = 64, VerticesOnly = 128 } |
| enum | ExternalizationType { Input = 1, Output = 2, IO = 3 } |
Public Member Functions | |
| virtual | ~ConvexShape () |
| virtual bool | isConvex () const |
| virtual gfx::Point3 | support (const gfx::Vector3 &v) const=0 |
| virtual BoundingBox | getBoundingBox () const=0 |
| virtual BoundingSphere | getBoundingSphere () const=0 |
| virtual bool | includesAppearance () const |
| virtual void | setIncludesAppearance (bool appearanceIncluded) |
| virtual const MassProperties & | getMassProperties (ref< const Material > material) const=0 |
| virtual gfx::Segment3 | shortestSegmentBetween (const base::Transform &t, const Point3 &p) const=0 |
| return the shortest segment between this shape (in configuration t) and the point p (the returned segment will always end with p) | |
| virtual gfx::Segment3 | shortestSegmentBetween (const base::Transform &t, const gfx::Segment3 &s) const=0 |
| return the shortest segment between this shape (in configuration t) and the segment s | |
| virtual gfx::Segment3 | shortestSegmentBetween (const base::Transform &t, const gfx::Triangle3 &tri) const=0 |
| return the shortest segment between this shape (in configuration t) and the triangle t | |
| virtual gfx::Segment3 | shortestSegmentBetween (const base::Transform &t, const gfx::Quad3 &q) const=0 |
| return the shortest segment between this shape (in configuration t) and the quad q | |
| virtual gfx::Segment3 | shortestSegmentBetween (const base::Transform &t1, ref< const Shape > s, const base::Transform &t2) const=0 |
| return the shortest segment between this shape (in configuration t1) and the shape s (in configuration t2) | |
| ref< Shape > | createShapeFromInput (base::Externalizer &e, String format="", Real version=1.0) |
| create a new concrete Shape (subclass) based on the next element that appears in the Input Externalizer stream | |
| base::ref< CollisionModel > | getCollisionModel (CollisionModel::CollisionModelType modelType) const |
| deprecated. | |
| void | reference () const |
| bool | unreference () const |
| const int | referenceCount () const |
| void | enableOnUnreferenceCall (bool enabled) |
| virtual void | onUnreference () const |
| virtual bool | visualTypeSupported (VisualType type) const |
| virtual osg::Node * | createOSGVisual (Visual::Attributes visualAttributes=0) const |
| virtual void | serialize (Serializer &s)=0 |
| read or write object state to Serializer | |
| virtual bool | isSameKindAs (const Object &) const |
| virtual bool | isSameKindAs (const ReferencedObject &) const |
| virtual String | className () const=0 |
| virtual bool | formatSupported (String format, Real version=1.0, ExternalizationType type=IO) const=0 |
| query if specific format is supported (for input, output or both) | |
| virtual void | externalize (Externalizer &e, String format="", Real version=1.0)=0 |
| read or write object state to Externalizer | |
| virtual void | externalize (Externalizer &e, String format="", Real version=1.0) const |
| write object state to Externalizer (throws if e is in Input) | |
| void | load (ref< VFile > archive, const String &format="", Real version=1.0) |
| void | save (ref< VFile > archive, const String &format="", Real version=1.0) |
Static Public Member Functions | |
| template<class BaseClass, class DerivedClass> void | registerSerializableInstantiator (const SerializableInstantiator &instantiator) |
| void | registerSerializableInstantiator (const String &baseClassTypeName, const String &derivedClassTypeName, const SerializableInstantiator &instantiator) |
| template<class BaseClass> const SerializableInstantiator & | getSerializableInstantiator (const String &derivedClassTypeName) |
| const SerializableInstantiator & | getSerializableInstantiator (const String &baseClassTypeName, const String &derivedClassTypeName) |
Static Public Attributes | |
| const Int | OSGVisual = 1 |
Protected Member Functions | |
| ref< CollisionModel > | getCollisionModelFromVisual (CollisionModel::CollisionModelType modelType) const |
Static Protected Member Functions | |
| osg::Node * | createOSGAxes (const base::Dimension3 &dim) |
Protected Attributes | |
| bool | shapeHasAppearance |
| int | _refCount |
| bool | onUnreferenceEnabled |
|
|
Definition at line 39 of file Visual. Referenced by gfx::Visual::createOSGVisual(). |
|
|
Definition at line 44 of file Visual. Referenced by gfx::Visual::visualTypeSupported(). |
|
|
|
|
|
Definition at line 40 of file Externalizable. |
|
|
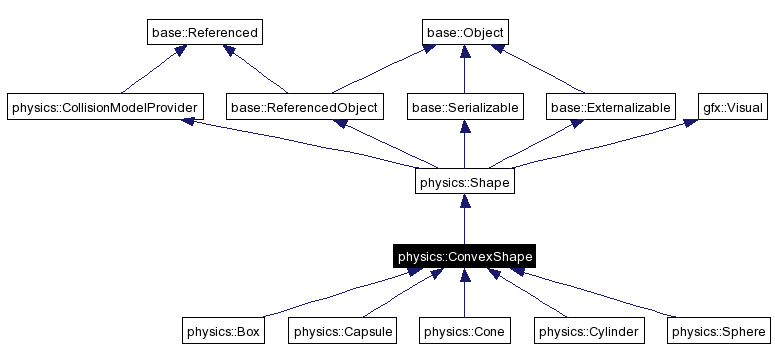
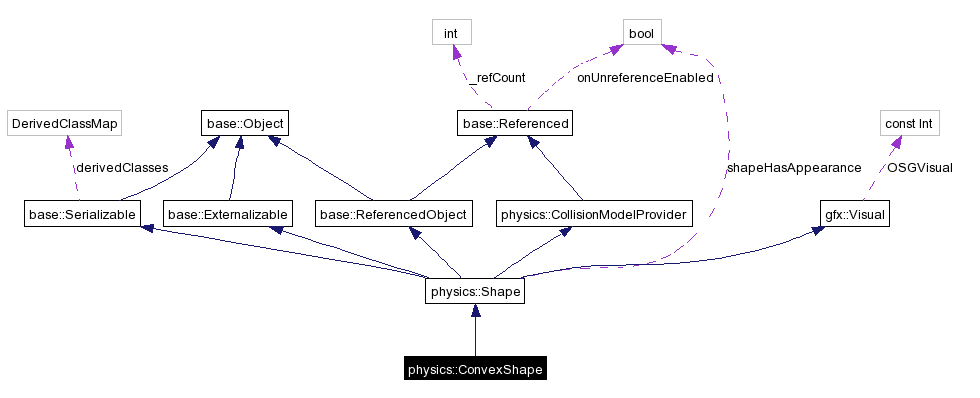
Definition at line 40 of file ConvexShape. |
|
|
|
|
|
|
Reimplemented in physics::GJKCollisionDetector, physics::OBBCollisionModel, physics::ODECollisionModel, physics::ODESolidSystem, physics::Solid, physics::SOLIDCollisionModel, and robot::sim::SimulatedBasicEnvironment. Definition at line 49 of file Visual. References gfx::Visual::Attributes, Logln, and NewObj. |
|
||||||||||||||||
|
create a new concrete Shape (subclass) based on the next element that appears in the Input Externalizer stream
|
|
|
If enabled, each call to unreference() will also call virtual method onUnreference() Definition at line 115 of file Referenced. References base::Referenced::onUnreferenceEnabled. |
|
||||||||||||||||
|
||||||||||||||||
|
||||||||||||||||
|
|
Implemented in physics::Box, physics::Capsule, physics::Cone, physics::Cylinder, physics::LODTerrain, physics::Polyhedron, physics::SimpleTerrain, physics::Sphere, and physics::Torus. |
|
|
Implemented in physics::Box, physics::Capsule, physics::Cone, physics::Cylinder, physics::LODTerrain, physics::Polyhedron, physics::SimpleTerrain, physics::Sphere, and physics::Torus. |
|
|
deprecated.
Implements physics::CollisionModelProvider. Reimplemented in physics::Box, physics::Capsule, physics::Cone, physics::Cylinder, physics::LODTerrain, physics::Polyhedron, physics::SimpleTerrain, physics::Sphere, and physics::Torus. |
|
|
|
|
|
Implemented in physics::Box, physics::Capsule, physics::Cone, physics::Cylinder, physics::LODTerrain, physics::Polyhedron, physics::Sphere, and physics::Torus. |
|
||||||||||||
|
|
|
||||||||||
|
Definition at line 71 of file Serializable. References base::String. |
|
|
Definition at line 60 of file Shape. References physics::Shape::shapeHasAppearance. |
|
|
Implements physics::Shape. Definition at line 42 of file ConvexShape. |
|
|
Definition at line 52 of file ReferencedObject. |
|
|
|
|
||||||||||||||||
|
|
|
|
Called by unreference() if enabled via enableOnUnreferenceCall(true). Typically overridden in subclasses that wish to know about unreference() calls - for example to handle manually breaking cyclic references Reimplemented in robot::control::ControllableAdaptor::AdaptorControlInterface, and robot::control::ControllableAdaptor. Definition at line 121 of file Referenced. Referenced by base::Referenced::unreference(). |
|
|
Increment the reference count by one, indicating that this object has another pointer which is referencing it. Definition at line 65 of file Referenced. References base::Referenced::_refCount. |
|
|
Return the number pointers currently referencing this object. Definition at line 112 of file Referenced. References base::Referenced::_refCount. Referenced by robot::control::ControllableAdaptor::AdaptorControlInterface::onUnreference(). |
|
||||||||||||||||
|
|
|
||||||||||
|
Definition at line 62 of file Serializable. |
|
||||||||||||||||
|
|
|
|
|
Definition at line 61 of file Shape. References physics::Shape::shapeHasAppearance. |
|
||||||||||||||||
|
return the shortest segment between this shape (in configuration t1) and the shape s (in configuration t2)
Implemented in physics::Box, physics::Capsule, physics::Cone, physics::Cylinder, physics::LODTerrain, physics::Polyhedron, physics::Sphere, and physics::Torus. |
|
||||||||||||
|
return the shortest segment between this shape (in configuration t) and the quad q
Implemented in physics::Box, physics::Capsule, physics::Cone, physics::Cylinder, physics::LODTerrain, physics::Polyhedron, physics::Sphere, and physics::Torus. |
|
||||||||||||
|
return the shortest segment between this shape (in configuration t) and the triangle t
Implemented in physics::Box, physics::Capsule, physics::Cone, physics::Cylinder, physics::LODTerrain, physics::Polyhedron, physics::Sphere, and physics::Torus. |
|
||||||||||||
|
return the shortest segment between this shape (in configuration t) and the segment s
Implemented in physics::Box, physics::Capsule, physics::Cone, physics::Cylinder, physics::LODTerrain, physics::Polyhedron, physics::Sphere, and physics::Torus. |
|
||||||||||||
|
return the shortest segment between this shape (in configuration t) and the point p (the returned segment will always end with p)
Implemented in physics::Box, physics::Capsule, physics::Cone, physics::Cylinder, physics::LODTerrain, physics::Polyhedron, physics::Sphere, and physics::Torus. |
|
|
Implemented in physics::Capsule, physics::Cone, and physics::Cylinder. |
|
|
Decrement the reference count by one, indicating that a pointer to this object is referencing it. If the refence count goes to zero, it is assumed that this object is nolonger referenced and is automatically deleted. Definition at line 81 of file Referenced. References base::Referenced::_refCount, Exception, base::Referenced::onUnreference(), and base::Referenced::onUnreferenceEnabled. |
|
|
Reimplemented in gfx::OSGWorld, gfx::VisualPath, physics::Box, physics::Capsule, physics::Cone, physics::Cylinder, physics::GJKCollisionDetector, physics::LODTerrain, physics::OBBCollisionModel, physics::ODECollisionModel, physics::ODESolidSystem, physics::Polyhedron, physics::Solid, physics::SOLIDCollisionModel, physics::Sphere, physics::Torus, physics::VisualDebugUtil, and robot::sim::VisualIKORTest. Definition at line 47 of file Visual. References gfx::Visual::VisualType. |
|
|
Definition at line 136 of file Referenced. Referenced by base::Referenced::reference(), base::Referenced::referenceCount(), base::Referenced::Referenced(), base::Referenced::unreference(), and base::Referenced::~Referenced(). |
|
|
Definition at line 137 of file Referenced. Referenced by base::Referenced::enableOnUnreferenceCall(), base::Referenced::Referenced(), and base::Referenced::unreference(). |
|
|
|
|
|
Definition at line 97 of file Shape. Referenced by physics::Shape::includesAppearance(), physics::Shape::setIncludesAppearance(), and physics::Shape::Shape(). |
 1.3.6
1.3.6