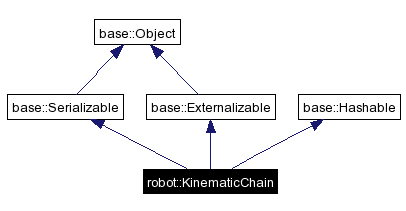
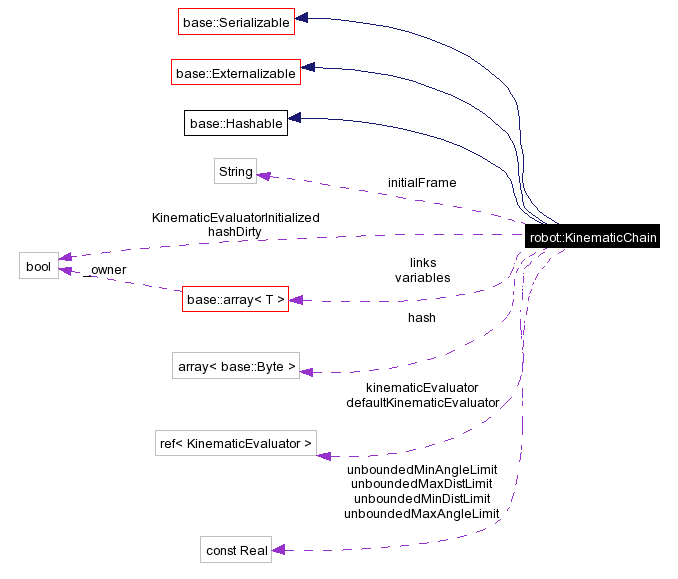
Inheritance diagram for robot::KinematicChain:
Public Types | |
| enum | UnitType { Distance, Angle } |
| unit type of parameters More... | |
| enum | ExternalizationType { Input = 1, Output = 2, IO = 3 } |
Public Member Functions | |
| KinematicChain () | |
| KinematicChain (const Link &l) | |
| KinematicChain (const KinematicChain &kc) | |
| virtual String | className () const |
| KinematicChain & | operator= (const KinematicChain &kc) |
| Int | size () const |
| no. of links in the chain | |
| Int | dof () const |
| no. of degrees-of-freedom (sum of joint variables for each link) | |
| bool | isDHType () const |
| true if the chain is comprised only of links for which link.isDHType() is true | |
| const Link & | operator[] (Int i) const |
| void | setLink (Int i, const Link &link) |
| const Link & | at (Int i) const |
| void | setLinkAt (Int i, const Link &link) |
| const Link & | linkOfVariable (Int i) const |
| get link that described joint controlled by variable i (0 <= i < dof()) | |
| Int | linkIndexOfVariable (Int i) const |
| UnitType | variableUnitType (Int i) const |
| Real | variableMinLimit (Int i) const |
| Real | variableMaxLimit (Int i) const |
| Real | variableMinAccel (Int i) const |
| Real | variableMaxAccel (Int i) const |
| void | activateLink (Int i, bool active=true) |
| bool | linkIsActive (Int i) const |
| Link | front () const |
| Link | back () const |
| void | push_back (const Link &l) |
| void | pop_back () |
| void | resize (Int newsize) |
| KinematicChain | subChain (Int first, Int count) const |
| bool | operator== (const KinematicChain &kc) const |
| bool | operator!= (const KinematicChain &kc) const |
| KinematicChain & | operator+= (const KinematicChain &kc) |
| KinematicChain & | insert (Int pos, const KinematicChain &kc) |
| KinematicChain & | insert (Int pos, const Link &l) |
| KinematicChain & | erase (Int pos) |
| KinematicChain & | erase (Int first, Int last) |
| void | setInitialFrame (const String &name) |
| const String & | getInitialFrame () const |
| void | setLinkFrame (Int i, const String &name) |
| const String & | getLinkFrame (Int i) const |
| Vector | transform (Int fromLink, Int toLink, const Vector &v, const Vector &q) const |
| transform point v from the reference frame of link i to the frame of link j, when chain is in configuration q | |
| Vector | transform (const String &fromFrame, const String &toFrame, const Vector &v, const Vector &q) const |
| Matrix | getForwardKinematics (const Vector &q) const |
| get the forward kinematics transform for joint parameters q | |
| Matrix | getJacobian (const Vector &q, bool includeOrientation=true) const |
| get the Jacobian matrix for joint parameters q | |
| array< Vector > | getJointOrigins (const Vector &q) const |
| get an array of the joint origin locations for parameters q | |
| array< Vector > | getLinkOrigins (const Vector &q) const |
| get an array of the link origin locations for parameters q | |
| void | setKinematicEvaluator (ref< KinematicEvaluator > evaluator) |
| void | convertJointTrajectory (ManipulatorJointTrajectory &jointTrajectory, ManipulatorJointTrajectory::AngularUnits units=ManipulatorJointTrajectory::Radians) const |
| virtual void | serialize (base::Serializer &s) |
| read or write object state to Serializer | |
| virtual bool | formatSupported (const String format, Real version=1.0, ExternalizationType type=IO) const |
| < query if specific format is supported (for input, output or both) | |
| virtual void | externalize (base::Externalizer &e, String format="", Real version=1.0) |
| read or write object state to Externalizer | |
| virtual void | externalize (base::Externalizer &e, String format="", Real version=1.0) const |
| write object state to Externalizer (throws if e is in Input) | |
| virtual base::array< base::Byte > | hashCode () const |
| virtual bool | isSameKindAs (const Object &) const |
| void | load (ref< VFile > archive, const String &format="", Real version=1.0) |
| void | save (ref< VFile > archive, const String &format="", Real version=1.0) |
Static Public Member Functions | |
| template<class BaseClass, class DerivedClass> void | registerSerializableInstantiator (const SerializableInstantiator &instantiator) |
| void | registerSerializableInstantiator (const String &baseClassTypeName, const String &derivedClassTypeName, const SerializableInstantiator &instantiator) |
| template<class BaseClass> const SerializableInstantiator & | getSerializableInstantiator (const String &derivedClassTypeName) |
| const SerializableInstantiator & | getSerializableInstantiator (const String &baseClassTypeName, const String &derivedClassTypeName) |
Static Public Attributes | |
| const Real | unboundedMinAngleLimit |
| const Real | unboundedMaxAngleLimit |
| const Real | unboundedMinDistLimit |
| const Real | unboundedMaxDistLimit |
Protected Types | |
| typedef base::array< Link > | LinkArray |
| typedef base::array< std::pair< Int, Int > > | VariableIndexArray |
Protected Member Functions | |
| KinematicChain (const LinkArray &la) | |
| void | computeVariables () |
| updates variables based on link joint dofs | |
| void | dirtyHash () const |
| void | initKinematicEvaluator () |
Protected Attributes | |
| LinkArray | links |
| VariableIndexArray | variables |
| ref< KinematicEvaluator > | kinematicEvaluator |
| KinematicEvaluator instance to use for this chain. | |
| String | initialFrame |
| bool | hashDirty |
| array< base::Byte > | hash |
Static Protected Attributes | |
| bool | KinematicEvaluatorInitialized |
| ref< KinematicEvaluator > | defaultKinematicEvaluator |
Definition at line 47 of file KinematicChain.
|
|
Definition at line 364 of file KinematicChain. Referenced by KinematicChain(). |
|
|
index is the variable no. for this chain, elements are a pair of Ints (link index, dof-index), where link index is link correpsonding to this joint variable (index into LinkArray), and dof-index is the degree of freedom for the link (for links representing joints with multiple dofs) Definition at line 369 of file KinematicChain. |
|
|
Definition at line 40 of file Externalizable. |
|
|
unit type of parameters
Definition at line 52 of file KinematicChain. Referenced by variableUnitType(). |
|
|
Definition at line 230 of file KinematicChain. References initKinematicEvaluator(). |
|
|
Definition at line 232 of file KinematicChain. References computeVariables(), initKinematicEvaluator(), and links. |
|
|
Definition at line 235 of file KinematicChain. References kinematicEvaluator, links, and variables. |
|
|
Definition at line 371 of file KinematicChain. References computeVariables(), LinkArray, and links. |
|
||||||||||||
|
Definition at line 272 of file KinematicChain. References Assert, computeVariables(), dirtyHash(), links, and size(). |
|
|
Definition at line 254 of file KinematicChain. |
|
|
Definition at line 278 of file KinematicChain. |
|
|
return the name of the object's class type. Must be defined by derived classes. Implements base::Object. Definition at line 239 of file KinematicChain. |
|
|
updates variables based on link joint dofs
Referenced by activateLink(), KinematicChain(), pop_back(), push_back(), resize(), and serialize(). |
|
||||||||||||
|
convert the components of the joint vectors in jointTrajectory corresponding to Revolute joints of the chain to the specified units Definition at line 339 of file KinematicChain. References Angle, robot::ManipulatorJointTrajectory::convertComponentUnits(), dof(), and variableUnitType(). |
|
|
Definition at line 389 of file KinematicChain. Referenced by activateLink(), operator=(), pop_back(), push_back(), resize(), serialize(), setInitialFrame(), setLink(), setLinkAt(), and setLinkFrame(). |
|
|
no. of degrees-of-freedom (sum of joint variables for each link)
Definition at line 247 of file KinematicChain. References base::array< T >::size(), and variables. Referenced by convertJointTrajectory(), linkIndexOfVariable(), linkOfVariable(), robot::operator<<(), and variableUnitType(). |
|
||||||||||||
|
|
|
|
|
|
||||||||||||||||
|
write object state to Externalizer (throws if e is in Input)
Reimplemented from base::Externalizable. Definition at line 357 of file KinematicChain. |
|
||||||||||||||||
|
read or write object state to Externalizer
Implements base::Externalizable. |
|
||||||||||||||||
|
< query if specific format is supported (for input, output or both)
Implements base::Externalizable. Definition at line 354 of file KinematicChain. |
|
|
Definition at line 277 of file KinematicChain. |
|
|
get the forward kinematics transform for joint parameters q
|
|
|
Definition at line 305 of file KinematicChain. References initialFrame. |
|
||||||||||||
|
get the Jacobian matrix for joint parameters q
|
|
|
get an array of the joint origin locations for parameters q
|
|
|
Definition at line 308 of file KinematicChain. |
|
|
get an array of the link origin locations for parameters q
|
|
||||||||||||
|
|
|
||||||||||
|
Definition at line 71 of file Serializable. References base::String. |
|
|
Whenever invoked on the same object more than once, the same byte array must be returned, provided no information used in == comparisons on the object is modified. Implements base::Hashable. |
|
|
Referenced by KinematicChain(). |
|
||||||||||||
|
|
|
||||||||||||
|
|
|
|
true if the chain is comprised only of links for which link.isDHType() is true
|
|
|
|
|
|
Definition at line 261 of file KinematicChain. |
|
|
Definition at line 274 of file KinematicChain. |
|
|
get link that described joint controlled by variable i (0 <= i < dof())
Definition at line 258 of file KinematicChain. References Assert, dof(), links, and variables. Referenced by variableMaxAccel(), variableMaxLimit(), variableMinAccel(), variableMinLimit(), and variableUnitType(). |
|
||||||||||||||||
|
|
|
|
Definition at line 293 of file KinematicChain. References links. |
|
|
|
|
|
Definition at line 241 of file KinematicChain. References dirtyHash(), links, and variables. |
|
|
Definition at line 292 of file KinematicChain. References links. |
|
|
Definition at line 251 of file KinematicChain. References links. |
|
|
Definition at line 283 of file KinematicChain. References computeVariables(), dirtyHash(), links, base::array< T >::resize(), and size(). |
|
|
Definition at line 280 of file KinematicChain. References base::array< T >::at(), computeVariables(), dirtyHash(), links, and size(). |
|
||||||||||||||||
|
|
|
||||||||||
|
Definition at line 62 of file Serializable. |
|
|
Definition at line 286 of file KinematicChain. References computeVariables(), dirtyHash(), links, and base::array< T >::resize(). |
|
||||||||||||||||
|
|
|
|
read or write object state to Serializer
Implements base::Serializable. Definition at line 350 of file KinematicChain. References computeVariables(), dirtyHash(), base::Serializer::isInput(), and links. |
|
|
Definition at line 304 of file KinematicChain. References dirtyHash(), and initialFrame. |
|
|
Definition at line 333 of file KinematicChain. References kinematicEvaluator. |
|
||||||||||||
|
Definition at line 252 of file KinematicChain. References dirtyHash(), and links. |
|
||||||||||||
|
Definition at line 255 of file KinematicChain. References Assert, dirtyHash(), links, and size(). |
|
||||||||||||
|
Definition at line 307 of file KinematicChain. References Assert, dirtyHash(), links, and size(). |
|
|
no. of links in the chain
Definition at line 246 of file KinematicChain. References links, and base::array< T >::size(). Referenced by activateLink(), at(), back(), front(), getLinkFrame(), linkIsActive(), robot::operator<<(), pop_back(), push_back(), setLinkAt(), and setLinkFrame(). |
|
||||||||||||
|
|
|
||||||||||||||||||||
|
transform point v from reference frame 'fromFrame' to 'toFrame' when chain is in cofiguration q e.g. if from=='ee' and to=='world', passing v=0 will give the ee coords. in the world frame (if 'ee' and 'world' are appropriately defined frame names) throws invalid_argument exception if either link frame names are unknown |
|
||||||||||||||||||||
|
transform point v from the reference frame of link i to the frame of link j, when chain is in configuration q
|
|
|
Definition at line 269 of file KinematicChain. References linkOfVariable(), robot::KinematicChain::Link::maxAccel(), and variables. |
|
|
Definition at line 267 of file KinematicChain. References linkOfVariable(), robot::KinematicChain::Link::maxLimit(), and variables. |
|
|
Definition at line 268 of file KinematicChain. References linkOfVariable(), robot::KinematicChain::Link::minAccel(), and variables. |
|
|
Definition at line 266 of file KinematicChain. References linkOfVariable(), robot::KinematicChain::Link::minLimit(), and variables. |
|
|
Definition at line 263 of file KinematicChain. References Assert, dof(), robot::KinematicChain::Link::dofUnitType(), linkOfVariable(), UnitType, and variables. Referenced by convertJointTrajectory(). |
|
|
Definition at line 381 of file KinematicChain. |
|
|
Definition at line 388 of file KinematicChain. |
|
|
Definition at line 387 of file KinematicChain. |
|
|
Definition at line 385 of file KinematicChain. Referenced by getInitialFrame(), and setInitialFrame(). |
|
|
KinematicEvaluator instance to use for this chain.
Definition at line 383 of file KinematicChain. Referenced by KinematicChain(), and setKinematicEvaluator(). |
|
|
Definition at line 380 of file KinematicChain. |
|
|
Definition at line 376 of file KinematicChain. Referenced by activateLink(), at(), back(), front(), getLinkFrame(), KinematicChain(), linkIsActive(), linkOfVariable(), operator!=(), operator=(), operator==(), operator[](), pop_back(), push_back(), resize(), serialize(), setLink(), setLinkAt(), setLinkFrame(), and size(). |
|
|
Definition at line 56 of file KinematicChain. |
|
|
Definition at line 58 of file KinematicChain. |
|
|
Definition at line 55 of file KinematicChain. |
|
|
Definition at line 57 of file KinematicChain. |
|
|
Definition at line 377 of file KinematicChain. Referenced by dof(), KinematicChain(), linkIndexOfVariable(), linkOfVariable(), operator=(), variableMaxAccel(), variableMaxLimit(), variableMinAccel(), variableMinLimit(), and variableUnitType(). |
 1.3.6
1.3.6