Public Types | |
| enum | AngularUnits { Degrees, Radians } |
| enum | ExternalizationType { Input = 1, Output = 2, IO = 3 } |
Public Member Functions | |
| ManipulatorJointTrajectory (Int numJoints=6, AngularUnits units=Radians) | |
| default trajectory - all points & times range over [0..1] secs. | |
| ManipulatorJointTrajectory (const ManipulatorJointTrajectory &t) | |
| copy trajectory t | |
| ManipulatorJointTrajectory (const base::Vector &sq, const base::Time &st, const base::Vector &eq, const base::Time &et, AngularUnits units=Radians) | |
| simple line segment start[joint configuration|time] - end[joint configuration|time] | |
| ManipulatorJointTrajectory (const array< base::Vector > &qs, const array< base::Time > ×=array< base::Time >(), bool deltas=false, AngularUnits units=Radians) | |
| virtual String | className () const |
| Int | getNumJoints () const |
| get the number of joints for each trajectory point (dim of qi's) | |
| void | setNumJoints (Int numJoints, bool truncateInitial=false) |
| AngularUnits | getAngularUnits () const |
| void | setAngularUnits (AngularUnits units) |
| void | convertComponentUnits (array< Int > components, AngularUnits units=Radians) |
| base::Vector | q (const base::Time &t) const |
| get joint-configuration at time t | |
| base::Time | time (Real s) const |
| get time at s:[0..1] | |
| Real | distinguishedValue (Int i) const |
| Int | numDistinguishedValues () const |
| < number of distinguished s values | |
| void | shiftTime (const base::Time &dt) |
| shift time by dt | |
| void | scaleTime (Real s) |
| scale time by s | |
| virtual Real | gets (const base::Time &t) const |
| get parameter s value at time t | |
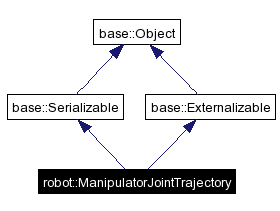
| virtual void | serialize (base::Serializer &s) |
| read or write object state to Serializer | |
| virtual bool | formatSupported (String format, Real version=1.0, ExternalizationType type=IO) const |
| query if specific format is supported (for input, output or both) | |
| virtual void | externalize (base::Externalizer &e, String format="", Real version=1.0) |
| read or write object state to Externalizer | |
| virtual bool | isSameKindAs (const Object &) const |
| virtual void | externalize (Externalizer &e, String format="", Real version=1.0) const |
| write object state to Externalizer (throws if e is in Input) | |
| void | load (ref< VFile > archive, const String &format="", Real version=1.0) |
| void | save (ref< VFile > archive, const String &format="", Real version=1.0) |
Static Public Member Functions | |
| template<class BaseClass, class DerivedClass> void | registerSerializableInstantiator (const SerializableInstantiator &instantiator) |
| void | registerSerializableInstantiator (const String &baseClassTypeName, const String &derivedClassTypeName, const SerializableInstantiator &instantiator) |
| template<class BaseClass> const SerializableInstantiator & | getSerializableInstantiator (const String &derivedClassTypeName) |
| const SerializableInstantiator & | getSerializableInstantiator (const String &baseClassTypeName, const String &derivedClassTypeName) |
Protected Member Functions | |
| void | init (const array< base::Vector > &qs, const array< base::Time > ×, bool deltas) |
| Int | findIndex (Real s) const |
| virtual void | computeSis (Int dof) |
| compute si's s.t. s:[0..1] maps to t:[start-time..end-time] | |
Protected Attributes | |
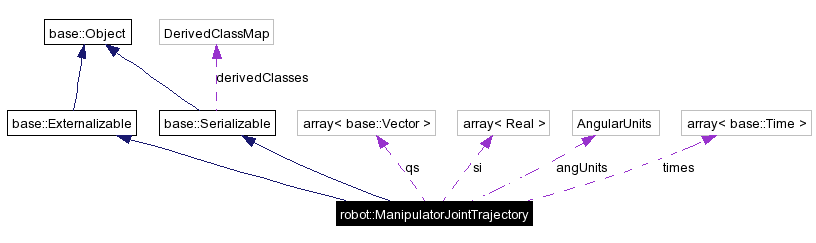
| array< base::Vector > | qs |
| joint-configuration 'waypoints' | |
| array< base::Time > | times |
| corresponding times | |
| array< Real > | si |
| value of s:[0..1] corresponding to each waypoint. | |
| AngularUnits | angUnits |
| are the angular elements to be considered as degrees or radians? (NB: there is no interpretation by this class) | |
Friends | |
| std::ostream & | operator<< (std::ostream &out, const ManipulatorJointTrajectory &t) |
Definition at line 45 of file ManipulatorJointTrajectory.
|
|
Definition at line 48 of file ManipulatorJointTrajectory. Referenced by getAngularUnits(). |
|
|
Definition at line 40 of file Externalizable. |
|
||||||||||||
|
default trajectory - all points & times range over [0..1] secs.
|
|
|
copy trajectory t
|
|
||||||||||||||||||||||||
|
simple line segment start[joint configuration|time] - end[joint configuration|time]
|
|
||||||||||||||||||||
|
a set of joint configuration 'waypoints' - and their corresponding times. if deltas is true, the arrays are considered to specify the inter-waypoint deltas instead (with the first point/orient being 0) |
|
|
return the name of the object's class type. Must be defined by derived classes. Implements base::Object. Definition at line 70 of file ManipulatorJointTrajectory. |
|
|
compute si's s.t. s:[0..1] maps to t:[start-time..end-time]
|
|
||||||||||||
|
given a set of component indices, this will convert the components of all trajectory points to the specified units if they are not already expressed in those units as indicated by getAngularUnits() Referenced by robot::KinematicChain::convertJointTrajectory(). |
|
|
some values of s correspond to distinguished points along a trajectory. the values s=0 and s=1 are always distinguished values. There will be a distinguished value of s for each waypoint. 0 <= i < numDistinguishedValues() Definition at line 103 of file ManipulatorJointTrajectory. |
|
||||||||||||||||
|
||||||||||||||||
|
read or write object state to Externalizer
Implements base::Externalizable. |
|
|
|
|
||||||||||||||||
|
query if specific format is supported (for input, output or both)
Implements base::Externalizable. |
|
|
even though this class doesn't interpret the values of the joint configuration vectors, it can be specified if the angular components are in degrees or radians (although which are angular is unknown to this class). This can be used to convert the appropriate elements when necessary Definition at line 86 of file ManipulatorJointTrajectory. References AngularUnits, and angUnits. |
|
|
get the number of joints for each trajectory point (dim of qi's)
Definition at line 73 of file ManipulatorJointTrajectory. |
|
|
get parameter s value at time t
|
|
||||||||||||
|
|
|
||||||||||
|
Definition at line 71 of file Serializable. References base::String. |
|
||||||||||||||||
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
< number of distinguished s values
Definition at line 105 of file ManipulatorJointTrajectory. |
|
|
get joint-configuration at time t
|
|
||||||||||||||||
|
|
|
||||||||||
|
Definition at line 62 of file Serializable. |
|
||||||||||||||||
|
|
|
|
scale time by s
|
|
|
read or write object state to Serializer
Implements base::Serializable. |
|
|
Definition at line 87 of file ManipulatorJointTrajectory. References angUnits. |
|
||||||||||||
|
change the number of joints in the trajectory points. If numJoints is larger than the current dimension, the extra dimensions will have their elements set to 0. If numJoints is smaller than the current, the extra dimension are discarded (additionally if truncateInitial is true, the initial elements are |
|
|
shift time by dt
|
|
|
get time at s:[0..1]
|
|
||||||||||||
|
Definition at line 142 of file ManipulatorJointTrajectory. |
|
|
are the angular elements to be considered as degrees or radians? (NB: there is no interpretation by this class)
Definition at line 131 of file ManipulatorJointTrajectory. Referenced by getAngularUnits(), and setAngularUnits(). |
|
|
joint-configuration 'waypoints'
Definition at line 127 of file ManipulatorJointTrajectory. Referenced by robot::operator<<(). |
|
|
value of s:[0..1] corresponding to each waypoint.
Definition at line 129 of file ManipulatorJointTrajectory. Referenced by robot::operator<<(). |
|
|
corresponding times
Definition at line 128 of file ManipulatorJointTrajectory. Referenced by robot::operator<<(). |
 1.3.6
1.3.6