Public Member Functions | |
| IKORFullSpaceSolver () | |
| virtual String | className () const |
| virtual Object & | clone () const |
| virtual Matrix | solve (const Matrix &A_in, const Vector &b_in, array< Int > &dependentRowsEliminated) |
| Computes a set of vectors gi that can be used to find solutions to Ax=b for x. | |
| virtual bool | isSameKindAs (const ReferencedObject &) const |
| virtual bool | isSameKindAs (const Object &) const |
| void | reference () const |
| bool | unreference () const |
| const int | referenceCount () const |
| void | enableOnUnreferenceCall (bool enabled) |
| virtual void | onUnreference () const |
Protected Types | |
| enum | Status { Unknown = 0, Restricted, Complete, NotComplete } |
Protected Member Functions | |
| IKORFullSpaceSolver (const IKORFullSpaceSolver &c) | |
| void | reduceA (const Matrix &A, Matrix &Ared, const Vector &b, Vector &bred, const Int M, const Int N, Int &Mred, Int &Nred, base::IVector &colElim, base::IVector &rowElim, Matrix &specialg, Int &numSpecialgs) |
| Reduces the A matrix. | |
| void | blockColFindX (Vector &g, const base::IVector &tackon, const Vector &block, const Vector &b, const Matrix &A, const Int Mred, const Int Nred) |
| calculate a new g vector for a given square blocking pattern | |
| void | restOfSoln (const Int M, const Int N, const Int Mred, const Int Nred, Int nextToFind, Matrix &block, Matrix &g, const Vector &bred, const Matrix &Ared, const base::IVector &tackon, base::IVector &firstOK) |
| Finds the remaining solution vectors after the first has been selected. | |
| bool | dependency (const Matrix &A, const base::IVector &slRow, Int Nred, Int first, Int second) const |
| returns true if the given two columns and dependent (used in special-case 1 detection) | |
| bool | checkRange (const Matrix &A, const Vector &b, const Matrix &g, const base::IVector &rowElim) |
| returns true if the original b is in the range of A | |
| void | rebuildgs (Matrix &g, const Int M, const Int N, const Int Mred, const Int Nred, const base::IVector &colElim, const base::IVector &rowElim, const Matrix &specialg, const Int numSpecialgs) |
| rebuilds the g Matrix | |
Static Protected Member Functions | |
| bool | isSmall (Real a) |
Protected Attributes | |
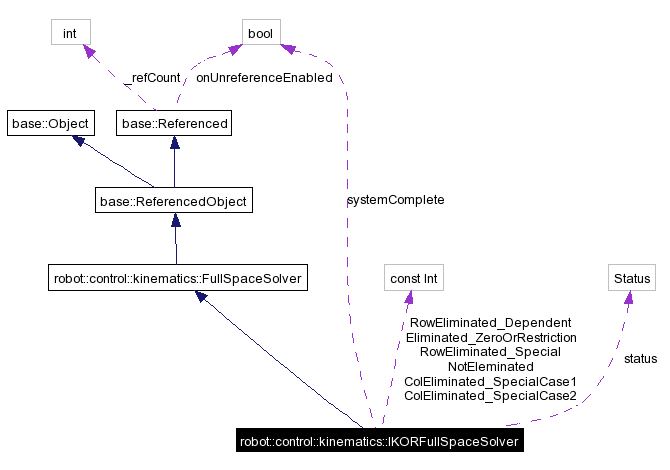
| bool | systemComplete |
| Status | status |
| int | _refCount |
| bool | onUnreferenceEnabled |
Static Protected Attributes | |
| const Int | NotEleminated = 0 |
| const Int | Eliminated_ZeroOrRestriction = 1 |
| const Int | RowEliminated_Dependent = 2 |
| const Int | RowEliminated_Special = 1 |
| const Int | ColEliminated_SpecialCase1 = 2 |
| const Int | ColEliminated_SpecialCase2 = 3 |
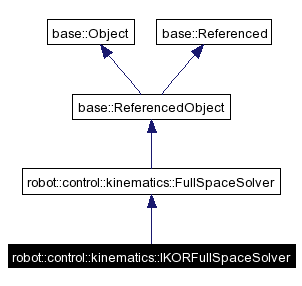
Definition at line 41 of file IKORFullSpaceSolver.
|
|
Definition at line 151 of file IKORFullSpaceSolver. |
|
|
Referenced by clone(). |
|
|
Definition at line 65 of file IKORFullSpaceSolver. |
|
||||||||||||||||||||||||||||||||
|
calculate a new g vector for a given square blocking pattern
|
|
||||||||||||||||||||
|
returns true if the original b is in the range of A
|
|
|
return the name of the object's class type. Must be defined by derived classes. Implements base::Object. Definition at line 46 of file IKORFullSpaceSolver. |
|
|
Definition at line 47 of file IKORFullSpaceSolver. References IKORFullSpaceSolver(), and NewObj. |
|
||||||||||||||||||||||||
|
returns true if the given two columns and dependent (used in special-case 1 detection)
|
|
|
If enabled, each call to unreference() will also call virtual method onUnreference() Definition at line 115 of file Referenced. References base::Referenced::onUnreferenceEnabled. |
|
|
|
|
|
Definition at line 52 of file ReferencedObject. |
|
|
Definition at line 77 of file IKORFullSpaceSolver. |
|
|
Called by unreference() if enabled via enableOnUnreferenceCall(true). Typically overridden in subclasses that wish to know about unreference() calls - for example to handle manually breaking cyclic references Reimplemented in robot::control::ControllableAdaptor::AdaptorControlInterface, and robot::control::ControllableAdaptor. Definition at line 121 of file Referenced. Referenced by base::Referenced::unreference(). |
|
||||||||||||||||||||||||||||||||||||||||
|
rebuilds the g Matrix adds zeros in eliminated cols and tacks on the g vectors created by special-case 1 |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Reduces the A matrix. This is what IKORv2.0 had to say (below). Again; why a general solution method for Matrices is talking about work spaces, joint etc. is a little concerning! Restricted work space motions can be identified by rows of the A which only have one nonzero element. Since the corresponding column must be present in all final joint space solutions, the appropriate joint space motion will be calculated before any redundancy resolution is performed, and the appropriate motions and joints will be removed from the work space and A respectively. Also such cases as dependent rows, and SpecialCase1 must be identified and dealt with. |
|
|
Increment the reference count by one, indicating that this object has another pointer which is referencing it. Definition at line 65 of file Referenced. References base::Referenced::_refCount. |
|
|
Return the number pointers currently referencing this object. Definition at line 112 of file Referenced. References base::Referenced::_refCount. Referenced by robot::control::ControllableAdaptor::AdaptorControlInterface::onUnreference(). |
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
Finds the remaining solution vectors after the first has been selected. It is recursive and thus calls itself when a valid solution is found, if this solution leads to a dead end, it will pop back to last solution and build from there. This insures that all possible combinations of blocking patterns are available, given first one, in pattern which follows the algoritm presented in the article. |
|
||||||||||||||||
|
Computes a set of vectors gi that can be used to find solutions to Ax=b for x.
Implements robot::control::kinematics::FullSpaceSolver. |
|
|
Decrement the reference count by one, indicating that a pointer to this object is referencing it. If the refence count goes to zero, it is assumed that this object is nolonger referenced and is automatically deleted. Definition at line 81 of file Referenced. References base::Referenced::_refCount, Exception, base::Referenced::onUnreference(), and base::Referenced::onUnreferenceEnabled. |
|
|
Definition at line 136 of file Referenced. Referenced by base::Referenced::reference(), base::Referenced::referenceCount(), base::Referenced::Referenced(), base::Referenced::unreference(), and base::Referenced::~Referenced(). |
|
|
Definition at line 74 of file IKORFullSpaceSolver. |
|
|
Definition at line 75 of file IKORFullSpaceSolver. |
|
|
Definition at line 71 of file IKORFullSpaceSolver. |
|
|
Definition at line 70 of file IKORFullSpaceSolver. |
|
|
Definition at line 137 of file Referenced. Referenced by base::Referenced::enableOnUnreferenceCall(), base::Referenced::Referenced(), and base::Referenced::unreference(). |
|
|
Definition at line 72 of file IKORFullSpaceSolver. |
|
|
Definition at line 73 of file IKORFullSpaceSolver. |
|
|
Definition at line 152 of file IKORFullSpaceSolver. |
|
|
Definition at line 149 of file IKORFullSpaceSolver. |
 1.3.6
1.3.6