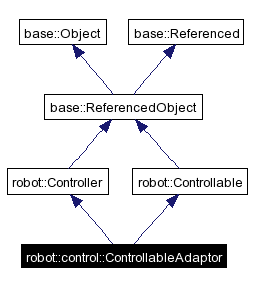
Inheritance diagram for robot::control::ControllableAdaptor:
Public Types | |
| enum | AdaptorType { PassThrough, Range, Stride } |
| enum | Param { End = -1 } |
Public Member Functions | |
| ControllableAdaptor (AdaptorType type, ref< Controllable > controllable, const String &interfaceName="", const String &adaptedInterfaceName="", const String &adaptedInterfaceType="") | |
| ControllableAdaptor (const ControllableAdaptor &c) | |
| virtual String | className () const |
| virtual Object & | clone () const |
| void | setRanges (Int inputStart=0, Int outputStart=0, SInt inputEnd=End, SInt outputEnd=End) |
| select subranges of input & output vectors | |
| void | setStrides (Int inputStart=0, Int outputStart=0, Int inputStride=1, Int outputStride=1) |
| select periodic elements from input & output vectors | |
| virtual void | setControlInterface (ref< ControlInterface > controlInterface) |
| virtual bool | isConnected () const |
| virtual bool | iterate (const base::Time &time) |
| virtual ref< ControlInterface > | getControlInterface (String interfaceName="") throw (std::invalid_argument) |
| Provide ControlInterface for named interface (or default/possibly-only interface). | |
| virtual bool | isSameKindAs (const ReferencedObject &) const |
| virtual bool | isSameKindAs (const Object &) const |
| void | reference () const |
| bool | unreference () const |
| const int | referenceCount () const |
| void | enableOnUnreferenceCall (bool enabled) |
Protected Member Functions | |
| void | indexOutOfRange () const |
| Int | adaptInputIndex (Int i) const |
| Int | adaptOutputIndex (Int i) const |
| virtual void | onUnreference () const |
| break cyclic reference with adaptorInterface | |
Protected Attributes | |
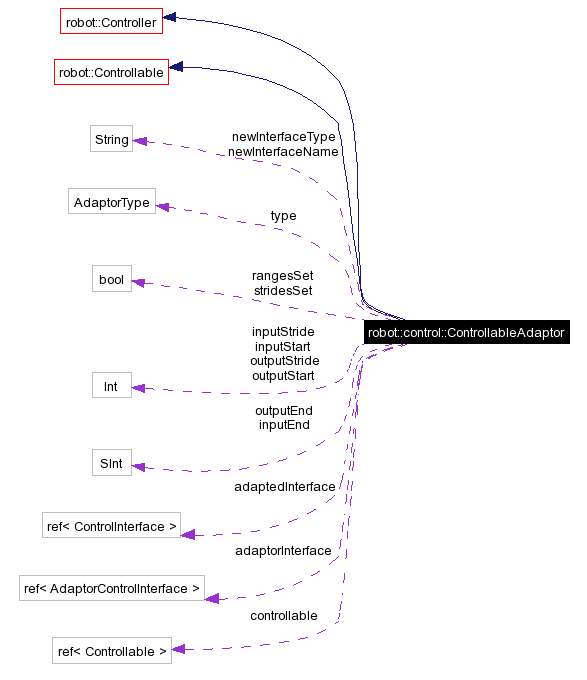
| AdaptorType | type |
| bool | rangesSet |
| Int | inputStart |
| Int | outputStart |
| SInt | inputEnd |
| SInt | outputEnd |
| bool | stridesSet |
| Int | inputStride |
| Int | outputStride |
| ref< Controllable > | controllable |
| Controllable we're adapting. | |
| ref< ControlInterface > | adaptedInterface |
| interface to be adapted | |
| ref< AdaptorControlInterface > | adaptorInterface |
| interface that adapts the controllable | |
| String | newInterfaceName |
| String | newInterfaceType |
| int | _refCount |
| bool | onUnreferenceEnabled |
Friends | |
| class | AdaptorControlInterface |
For example, by selecting a range of inputs and outputs.
Definition at line 46 of file ControllableAdaptor.
|
|
Definition at line 49 of file ControllableAdaptor. |
|
|
Definition at line 50 of file ControllableAdaptor. |
|
||||||||||||||||||||||||
|
Referenced by clone(). |
|
|
|
|
|
|
|
|
|
|
|
return the name of the object's class type. Must be defined by derived classes. Implements base::Object. Definition at line 57 of file ControllableAdaptor. |
|
|
Definition at line 58 of file ControllableAdaptor. References ControllableAdaptor(), and NewObj. |
|
|
If enabled, each call to unreference() will also call virtual method onUnreference() Definition at line 115 of file Referenced. References base::Referenced::onUnreferenceEnabled. |
|
|
Provide ControlInterface for named interface (or default/possibly-only interface).
Implements robot::Controllable. |
|
|
Definition at line 86 of file ControllableAdaptor. References Exception. |
|
|
Query if the Controller has been passed all the ControlInterfaces it needs via setControlInterface() Reimplemented from robot::Controller. Definition at line 69 of file ControllableAdaptor. References adaptedInterface. |
|
|
|
|
|
Definition at line 52 of file ReferencedObject. |
|
|
Execute an iteration of the control loop. returns true if it wants to quit the loop - however this may be ignored by the user/caller. Implements robot::Controller. |
|
|
break cyclic reference with adaptorInterface
Reimplemented from base::Referenced. |
|
|
Increment the reference count by one, indicating that this object has another pointer which is referencing it. Definition at line 65 of file Referenced. References base::Referenced::_refCount. |
|
|
Return the number pointers currently referencing this object. Definition at line 112 of file Referenced. References base::Referenced::_refCount. Referenced by robot::control::ControllableAdaptor::AdaptorControlInterface::onUnreference(). |
|
|
Provide ControlInterface through which Controller may control. Can be called multiple times to pass multiple ControlInterfaces. Unknown ControlInterface types will be ignored. Implements robot::Controller. |
|
||||||||||||||||||||
|
select subranges of input & output vectors
|
|
||||||||||||||||||||
|
select periodic elements from input & output vectors
|
|
|
Decrement the reference count by one, indicating that a pointer to this object is referencing it. If the refence count goes to zero, it is assumed that this object is nolonger referenced and is automatically deleted. Definition at line 81 of file Referenced. References base::Referenced::_refCount, Exception, base::Referenced::onUnreference(), and base::Referenced::onUnreferenceEnabled. |
|
|
Definition at line 136 of file ControllableAdaptor. |
|
|
Definition at line 136 of file Referenced. Referenced by base::Referenced::reference(), base::Referenced::referenceCount(), base::Referenced::Referenced(), base::Referenced::unreference(), and base::Referenced::~Referenced(). |
|
|
interface to be adapted
Definition at line 131 of file ControllableAdaptor. Referenced by isConnected(). |
|
|
interface that adapts the controllable
Definition at line 132 of file ControllableAdaptor. |
|
|
Controllable we're adapting.
Definition at line 130 of file ControllableAdaptor. |
|
|
Definition at line 80 of file ControllableAdaptor. |
|
|
Definition at line 79 of file ControllableAdaptor. |
|
|
Definition at line 82 of file ControllableAdaptor. |
|
|
Definition at line 133 of file ControllableAdaptor. |
|
|
Definition at line 134 of file ControllableAdaptor. |
|
|
Definition at line 137 of file Referenced. Referenced by base::Referenced::enableOnUnreferenceCall(), base::Referenced::Referenced(), and base::Referenced::unreference(). |
|
|
Definition at line 80 of file ControllableAdaptor. |
|
|
Definition at line 79 of file ControllableAdaptor. |
|
|
Definition at line 82 of file ControllableAdaptor. |
|
|
Definition at line 78 of file ControllableAdaptor. |
|
|
Definition at line 81 of file ControllableAdaptor. |
|
|
Definition at line 77 of file ControllableAdaptor. |
 1.3.6
1.3.6