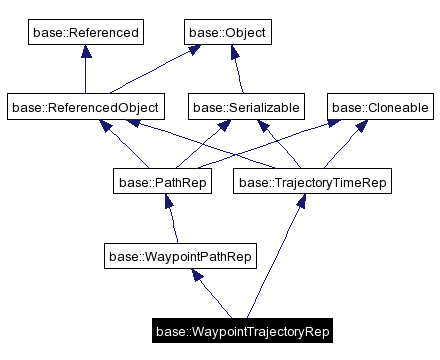
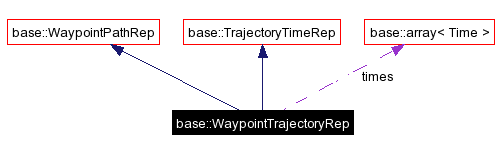
Inheritance diagram for base::WaypointTrajectoryRep:
Public Member Functions | |
| WaypointTrajectoryRep (const array< Point3 > &points, const array< Orient > &orients, const array< Time > ×) | |
| virtual Object & | clone () const |
| virtual String | className () const |
| virtual Time | time (Real s) const |
| get time at s:[0..1] | |
| virtual void | shiftTime (const Time &dt) |
| shift time by dt | |
| virtual void | scaleTime (Real s) |
| scale time by s | |
| virtual Real | gets (const Time &t) const |
| get parameter s value at time t | |
| virtual void | serialize (Serializer &s) |
| read or write object state to Serializer | |
| virtual Point3 | position (Real s) const |
| get cartesian position at s:[0..1] | |
| virtual Orient | orientation (Real s) const |
| get orientation at s:[0..1] | |
| virtual Real | distinguishedValue (Int i) const |
| virtual Int | numDistinguishedValues () const |
| number of distinguished s values | |
| virtual void | translate (const Vector3 &t) |
| translate the path position by t | |
| virtual void | rotate (const Quat4 &r) |
| rotate the path orientation by r | |
| virtual void | transform (const Matrix4 &m) |
| transform the path by m | |
| virtual void | scalePosition (Real s) |
| scale position coords. by s | |
| virtual bool | isSameKindAs (const ReferencedObject &) const |
| virtual bool | isSameKindAs (const Object &) const |
| void | reference () const |
| bool | unreference () const |
| const int | referenceCount () const |
| void | enableOnUnreferenceCall (bool enabled) |
| virtual void | onUnreference () const |
Static Public Member Functions | |
| template<class BaseClass, class DerivedClass> void | registerSerializableInstantiator (const SerializableInstantiator &instantiator) |
| void | registerSerializableInstantiator (const String &baseClassTypeName, const String &derivedClassTypeName, const SerializableInstantiator &instantiator) |
| template<class BaseClass> const SerializableInstantiator & | getSerializableInstantiator (const String &derivedClassTypeName) |
| const SerializableInstantiator & | getSerializableInstantiator (const String &baseClassTypeName, const String &derivedClassTypeName) |
Protected Types | |
| enum | Flags { None = 0, ConstPos = 1, ConstOrient = 2 } |
Protected Member Functions | |
| WaypointTrajectoryRep () | |
| WaypointTrajectoryRep (const array< Point3 > &points, const array< Orient > &orients, const array< Time > ×, array< Real > si, Int flags) | |
| virtual void | computeSis () |
| compute si's s.t. s:[0..1] maps to t:[start-time..end-time] | |
| Int | findIndex (Real s) const |
| find the closest index into points/orients before s | |
Protected Attributes | |
| array< Time > | times |
| array< Point3 > | points |
| array< Orient > | orients |
| array< Real > | si |
| value of s:[0..1] corresponding to each waypoint. | |
| Int | flags |
| int | _refCount |
| bool | onUnreferenceEnabled |
Friends | |
| class | Serializable::SerializableDerivedInstantiator< WaypointTrajectoryRep > |
| class | Serializable::SerializableDerivedInstantiator< WaypointPathRep > |
Definition at line 37 of file WaypointTrajectoryRep.
|
|
Definition at line 74 of file WaypointPathRep. |
|
||||||||||||||||
|
Definition at line 40 of file WaypointTrajectoryRep. References computeSis(). |
|
|
Definition at line 70 of file WaypointTrajectoryRep. Referenced by clone(). |
|
||||||||||||||||||||||||
|
Definition at line 71 of file WaypointTrajectoryRep. References base::Int. |
|
|
return the name of the object's class type. Must be defined by derived classes. Reimplemented from base::WaypointPathRep. Definition at line 53 of file WaypointTrajectoryRep. References base::String. |
|
|
return a shallow copy, with Object& return type. Must be defined by derived classes. Reimplemented from base::WaypointPathRep. Definition at line 50 of file WaypointTrajectoryRep. References NewObj, and WaypointTrajectoryRep(). |
|
|
compute si's s.t. s:[0..1] maps to t:[start-time..end-time]
Reimplemented from base::WaypointPathRep. Referenced by WaypointTrajectoryRep(). |
|
|
some values of s may correspond to distinguished points along a path. the values s=0 and s=1 are always distinguished values. For example, if the path was specified using waypoints, then there will be a distinguished value of s for each waypoint. 0 <= i < numDistinguishedValues() Reimplemented from base::PathRep. |
|
|
If enabled, each call to unreference() will also call virtual method onUnreference() Definition at line 115 of file Referenced. References base::Referenced::onUnreferenceEnabled. |
|
|
find the closest index into points/orients before s
|
|
|
get parameter s value at time t
Implements base::TrajectoryTimeRep. |
|
||||||||||||
|
|
|
||||||||||
|
Definition at line 71 of file Serializable. References base::String. |
|
|
|
|
|
Definition at line 52 of file ReferencedObject. |
|
|
number of distinguished s values
Reimplemented from base::PathRep. |
|
|
Called by unreference() if enabled via enableOnUnreferenceCall(true). Typically overridden in subclasses that wish to know about unreference() calls - for example to handle manually breaking cyclic references Reimplemented in robot::control::ControllableAdaptor::AdaptorControlInterface, and robot::control::ControllableAdaptor. Definition at line 121 of file Referenced. Referenced by base::Referenced::unreference(). |
|
|
get orientation at s:[0..1]
Implements base::PathRep. |
|
|
get cartesian position at s:[0..1]
Implements base::PathRep. |
|
|
Increment the reference count by one, indicating that this object has another pointer which is referencing it. Definition at line 65 of file Referenced. References base::Referenced::_refCount. |
|
|
Return the number pointers currently referencing this object. Definition at line 112 of file Referenced. References base::Referenced::_refCount. Referenced by robot::control::ControllableAdaptor::AdaptorControlInterface::onUnreference(). |
|
||||||||||||||||
|
|
|
||||||||||
|
Definition at line 62 of file Serializable. |
|
|
rotate the path orientation by r
Implements base::PathRep. |
|
|
scale position coords. by s
Implements base::PathRep. |
|
|
scale time by s
Implements base::TrajectoryTimeRep. |
|
|
read or write object state to Serializer
Reimplemented from base::WaypointPathRep. |
|
|
shift time by dt
Implements base::TrajectoryTimeRep. |
|
|
get time at s:[0..1]
Implements base::TrajectoryTimeRep. |
|
|
transform the path by m
Implements base::PathRep. |
|
|
translate the path position by t
Implements base::PathRep. |
|
|
Decrement the reference count by one, indicating that a pointer to this object is referencing it. If the refence count goes to zero, it is assumed that this object is nolonger referenced and is automatically deleted. Definition at line 81 of file Referenced. References base::Referenced::_refCount, Exception, base::Referenced::onUnreference(), and base::Referenced::onUnreferenceEnabled. |
|
|
Definition at line 92 of file WaypointPathRep. |
|
|
Definition at line 80 of file WaypointTrajectoryRep. |
|
|
Definition at line 136 of file Referenced. Referenced by base::Referenced::reference(), base::Referenced::referenceCount(), base::Referenced::Referenced(), base::Referenced::unreference(), and base::Referenced::~Referenced(). |
|
|
Definition at line 90 of file WaypointPathRep. |
|
|
Definition at line 137 of file Referenced. Referenced by base::Referenced::enableOnUnreferenceCall(), base::Referenced::Referenced(), and base::Referenced::unreference(). |
|
|
Definition at line 81 of file WaypointPathRep. Referenced by base::WaypointPathRep::clone(). |
|
|
Definition at line 80 of file WaypointPathRep. Referenced by base::WaypointPathRep::clone(). |
|
|
value of s:[0..1] corresponding to each waypoint.
Definition at line 82 of file WaypointPathRep. Referenced by base::WaypointPathRep::clone(). |
|
|
Definition at line 75 of file WaypointTrajectoryRep. |
 1.3.6
1.3.6