|
Public Types |
| enum | SolutionMethod { PseudoInverse,
FullSpace
} |
| enum | ExternalizationType { Input = 1,
Output = 2,
IO = 3
} |
Public Member Functions |
| | Test (const String &name="") |
| virtual String | className () const |
| void | saveResult (ref< base::VFileSystem > filesystem, base::PathName alternateOutputFileName=base::PathName()) |
| virtual bool | formatSupported (const String format, Real version=1.0, ExternalizationType type=IO) const |
| | query if specific format is supported (for input, output or both)
|
| virtual void | externalize (base::Externalizer &e, String format="", Real version=1.0) |
| | read or write object state to Externalizer
|
| virtual const String & | getName () const |
| virtual void | externalize (Externalizer &e, String format="", Real version=1.0) const |
| | write object state to Externalizer (throws if e is in Input)
|
| void | load (ref< VFile > archive, const String &format="", Real version=1.0) |
| void | save (ref< VFile > archive, const String &format="", Real version=1.0) |
| virtual bool | isSameKindAs (const Object &) const |
Public Attributes |
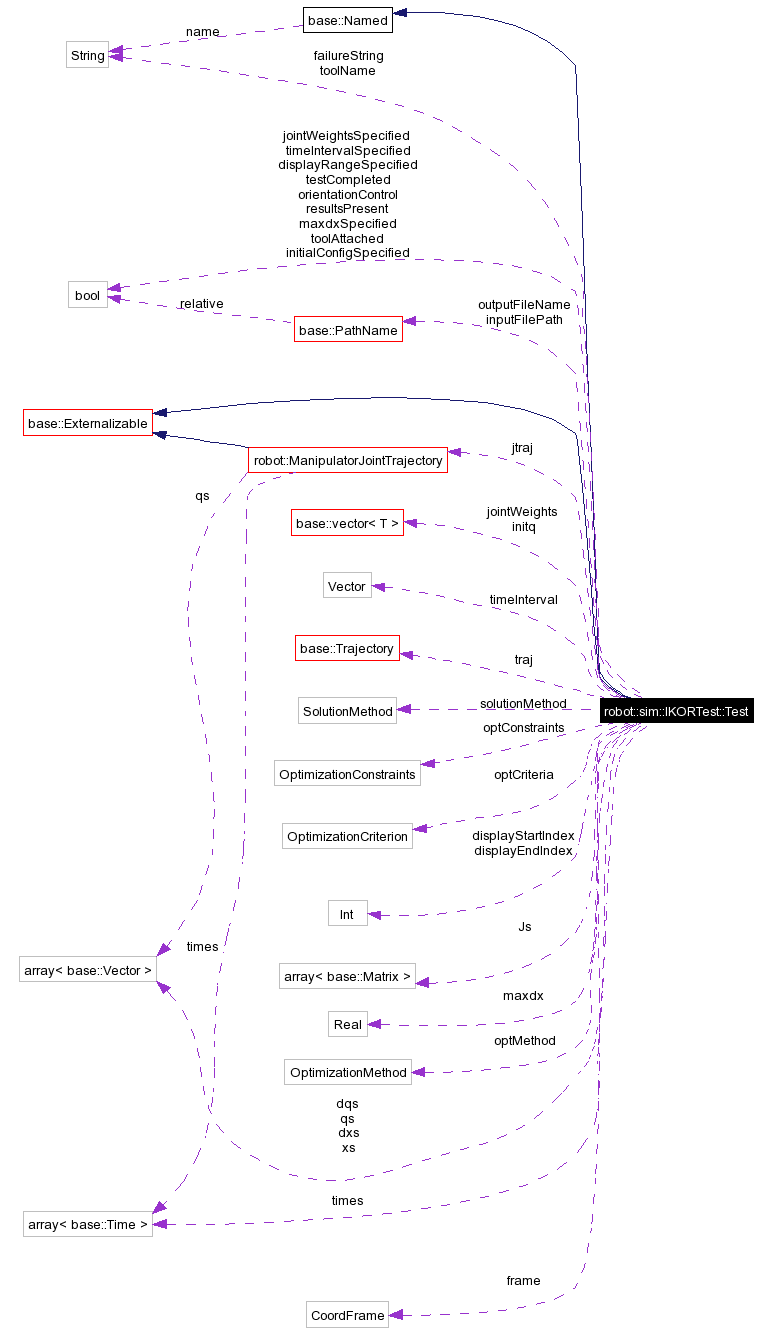
| bool | initialConfigSpecified |
| | if true, use q as the initial joint configuration, otherwise use the currrent configuration
|
| base::Vector | initq |
| | initial joint configuration
|
| base::Trajectory | traj |
| | trajectory/path for manipulator to follow
|
| bool | toolAttached |
| String | toolName |
| Robot::CoordFrame | frame |
| | reference frame of specified the trajectory
|
| bool | timeIntervalSpecified |
| | true if an overriding time interval was specified for the trajectory
|
| Vector | timeInterval |
| bool | maxdxSpecified |
| | true if a maximum dx length was specified
|
| Real | maxdx |
| | maximum value of dx length for any trajectory step
|
| bool | orientationControl |
| bool | jointWeightsSpecified |
| base::Vector | jointWeights |
| | joint params weights
|
| SolutionMethod | solutionMethod |
| robot::control::kinematics::InverseKinematicsSolver::OptimizationMethod | optMethod |
| robot::control::kinematics::InverseKinematicsSolver::OptimizationCriterion | optCriteria |
| robot::control::kinematics::InverseKinematicsSolver::OptimizationConstraints | optConstraints |
| bool | resultsPresent |
| | are there test results recorded? (either via externalization input or generated by execution)
|
| array< base::Vector > | qs |
| | test output; sequence of 'joint' parameter vectors
|
| array< base::Vector > | xs |
| | test output; sequence of end-effector positions/orientations
|
| array< base::Vector > | dxs |
| | test output; sequence of end-effector displacements
|
| array< base::Vector > | dqs |
| | test output; sequence of 'joint' parameter displacements
|
| array< base::Time > | times |
| | test output; sequence of times
|
| array< base::Matrix > | Js |
| | test output; sequence of J(q) jacobian matrices
|
| ManipulatorJointTrajectory | jtraj |
| | test output trajectory in 'joint' space (dim is chain.dof() - so also includes any platform dofs)
|
| bool | testCompleted |
| | true if the test completed, fasle if an error occured and only partial results are available
|
| String | failureString |
| | if !testCompleted, provides the failure error message
|
| base::PathName | outputFileName |
| | output file specified in testspec file
|
| base::PathName | inputFilePath |
| | path from which testspec was loaded
|
| bool | displayRangeSpecified |
| | true if a subrange of the result joint trajectory has been specified for display purposes
|
| Int | displayStartIndex |
| Int | displayEndIndex |
Protected Member Functions |
| virtual void | setName (const String &name) |
 1.3.6
1.3.6