|
|
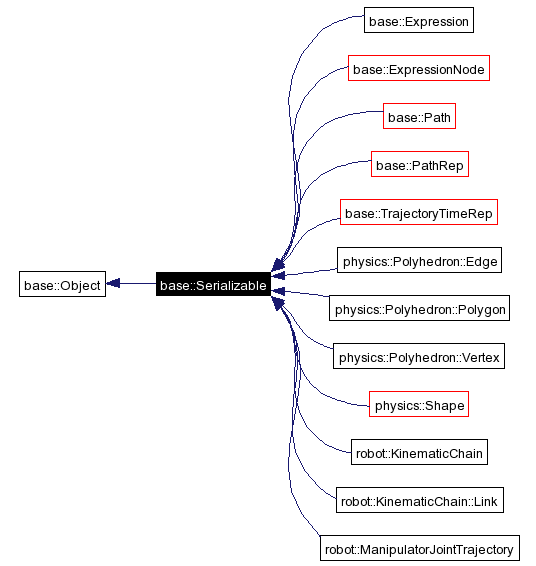
return the name of the object's class type. Must be defined by derived classes.
Implemented in base::Application, base::BinarySerializer, base::Cache, base::CacheDirectory, base::CacheFile, base::ConstantExpression, base::CosExpression, base::DifferenceExpression, base::Directory, base::Expression, base::Externalizer, base::File, base::LineSegPathRep, base::LineSegTrajectoryRep, base::Math, base::NegateExpression, base::ParametricPathRep, base::ParametricTrajectoryRep, base::Path, base::PathComponent, base::PathName, base::ProductExpression, base::QuotientExpression, base::SimpleXMLSerializer, base::SinExpression, base::StdFileSystem, base::SumExpression, base::Time, base::Trajectory, base::Universe, base::VariableExpression, base::VDirectory, base::WaypointPathRep, base::WaypointTrajectoryRep, base::World, gfx::IndexedPoint3Array, gfx::OSGWorld, gfx::TriangleIterator, gfx::VisualPath, gfx::VisualTriangles, gfx::VisualTriangles::TriangleArrayIteratorState, physics::Body, physics::Box, physics::Capsule, physics::CollidableGroup, physics::CollisionModel::ModelState, physics::CollisionState, physics::Cone, physics::Cylinder, physics::DynamicSpatial, physics::GJKCollisionDetector, physics::GJKCollisionDetector::GJKCollisionState, physics::GJKCollisionModel, physics::HeightField, physics::LODTerrain, physics::MassProperties, physics::Material, physics::NullCollisionResponseHandler, physics::OBBCollisionDetector, physics::OBBCollisionDetector::OBBCollisionState, physics::OBBCollisionModel, physics::ODEBallJoint, physics::ODECollidableBody, physics::ODECollidableBody::BodyState, physics::ODECollidableGroup, physics::ODECollisionCuller, physics::ODECollisionDetector, physics::ODECollisionDetector::ODECollisionState, physics::ODECollisionModel, physics::ODECollisionResponseHandler, physics::ODEConstraintGroup, physics::ODEContactConstraint, physics::ODEDoubleHingeJoint, physics::ODEFixedConstraint, physics::ODEHingeJoint, physics::ODEMotor, physics::ODESliderJoint, physics::ODESolid, physics::ODESolidConnectedCollidableBody, physics::ODESolidSystem, physics::ODEUniversalJoint, physics::Polyhedron, physics::Polyhedron::Vertex, physics::Polyhedron::Edge, physics::Polyhedron::Polygon, physics::SimpleCollisionCuller, physics::SimpleTerrain, physics::Solid, physics::SOLIDCollisionDetector, physics::SOLIDCollisionDetector::SOLIDCollisionState, physics::SOLIDCollisionModel, physics::SolidCollisionResponseHandler, physics::SpatialGroup, physics::SpatialTransform, physics::Sphere, physics::Torus, physics::VisualDebugUtil, robot::AggregateControlInterface, robot::control::ControllableAdaptor, robot::control::ControllableAdaptor::AdaptorControlInterface, robot::control::kinematics::AnalyticLagrangianFSBetaOptimizer, robot::control::kinematics::AnalyticLagrangianNullSpaceBetaOptimizer, robot::control::kinematics::BetaFormConstraints::BetaFormConstraint, robot::control::kinematics::BetaFormConstraints, robot::control::kinematics::IKOR, robot::control::kinematics::IKOR::JointLimitBetaConstraint, robot::control::kinematics::IKOR::PushAwayBetaConstraint, robot::control::kinematics::IKOR::RankLossBetaConstraint, robot::control::kinematics::IKORController, robot::control::kinematics::IKORController::EEPositionControlInterface, robot::control::kinematics::IKORController::LinkPositionsControlInterface, robot::control::kinematics::IKORFullSpaceSolver, robot::control::kinematics::LeastNormIKSolver, robot::control::kinematics::MPPseudoInvSolver, robot::control::kinematics::OldIKOR, robot::control::kinematics::ReferenceOpVectorFormObjective, robot::control::kinematics::SVDFullSpaceSolver, robot::control::ManipulatorPIDPositionController, robot::control::ManipulatorPIDPositionController::PositionInterface, robot::JFKengine, robot::KinematicChain::Link, robot::KinematicChain, robot::ManipulatorDescription, robot::ManipulatorJointTrajectory, robot::NumericKinematicEvaluator, robot::PlatformDescription, robot::RobotDescription, robot::sim::BasicEnvironment, robot::sim::BasicEnvironment::Tool, robot::sim::BasicEnvironment::Obstacle, robot::sim::Environment, robot::sim::IKORTest, robot::sim::IKORTest::Test, robot::sim::IKORTester, robot::sim::SimulatedBasicEnvironment, robot::sim::SimulatedKinematicChain::ProximityCollisionResponseHandler, robot::sim::SimulatedManipulatorDescription, robot::sim::SimulatedPlatform, robot::sim::SimulatedRobot, robot::sim::SimulatedRobot::ManipulatorControlInterface, robot::sim::SimulatedRobot::ToolControlInterface, robot::sim::SimulatedRobot::PlatformControlInterface, robot::sim::SimulatedRobot::ProximitySensorInterface, robot::sim::SimulatedRobotDescription, robot::sim::SimulatedSerialManipulator, robot::sim::SimulatedTool, robot::sim::TestBasicEnvironment, robot::sim::VisualIKORTest, robot::TestRobot, robot::TestRobot::ManipulatorControlInterface, robot::TestRobot::ToolControlInterface, robot::TestRobot::PlatformControlInterface, robot::TestRobot::ProximitySensorInterface, and robot::ToolDescription. |
 1.3.6
1.3.6