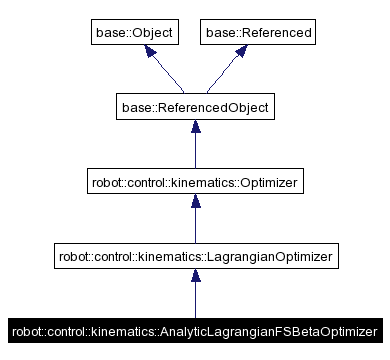
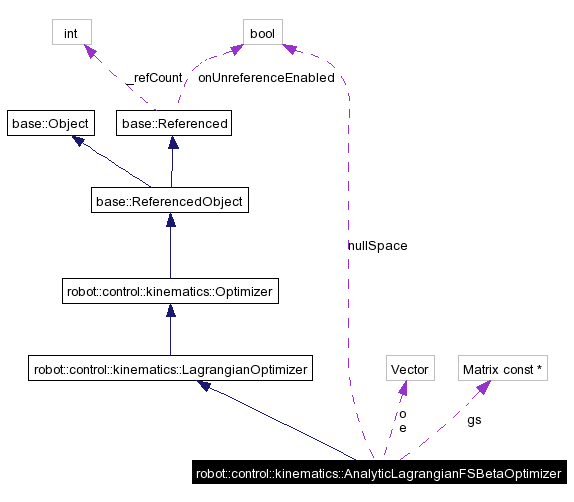
Inheritance diagram for robot::control::kinematics::AnalyticLagrangianFSBetaOptimizer:
Public Member Functions | |
| AnalyticLagrangianFSBetaOptimizer () | |
| virtual String | className () const |
| virtual void | setGs (const Matrix &gs) |
| set the gs (Matrix of column vectors that span the full-space) | |
| void | setSolveForNullspace (bool nullSpace) |
| indicate if a solution is sought in the null-space | |
| virtual Vector | optimize (ref< const Objective > objective, ref< const Constraints > constraints) const |
| optimize the objective with the given constraints | |
| virtual bool | isSameKindAs (const ReferencedObject &) const |
| virtual bool | isSameKindAs (const Object &) const |
| void | reference () const |
| bool | unreference () const |
| const int | referenceCount () const |
| void | enableOnUnreferenceCall (bool enabled) |
| virtual void | onUnreference () const |
Protected Member Functions | |
| Vector | calct (const Matrix &Ginv, const Vector &H, ref< const BetaFormConstraints > betaConstraints, bool nullSpace) const |
| compute t Vector | |
Protected Attributes | |
| Matrix const * | gs |
| matrix of column vectors that span the solition space of dq's (from a full-space solver) | |
| bool | nullSpace |
| Vector | o |
| Vector | e |
| int | _refCount |
| bool | onUnreferenceEnabled |
Analytic Lagrangian optimizer in Full-Space with Beta form constraints. The paper below details a optimizaiton method that provides an analytic solution for a Lagrangian-type problem, given the objective function and constraints are of a particular form. The objective form is represented via the ReferenceOpVectorFormObjective class and the form of the constraints via the BetaFormConstraints class.
see 1. "Resolving Kinematic Redundancy with Constraints Using the FSP (Full Space Parameterization) Approach", Francois G. Pin & Faithlyn A. Tulloch, Proceedings of the 1996 IEEE International Conference on Robotics and Automation.
for the formulation of the non-holonomic constraint solution, see 2. "Motion Planning for Mobile Manipulators with a Non-Holonomic Constraint Using the FSP (Full Space Parameterization) Method", Francois G. Pin, Kristi A. Morgansen, Faithlyn A. Tulloch, Charles J. Hacker and Kathryn B. Gower, Journal of Robotic Systems 13(11), 723-736 (1996).
Definition at line 58 of file AnalyticLagrangianFSBetaOptimizer.
|
|
Definition at line 61 of file AnalyticLagrangianFSBetaOptimizer. |
|
||||||||||||||||||||
|
compute t Vector
|
|
|
return the name of the object's class type. Must be defined by derived classes. Implements base::Object. Definition at line 64 of file AnalyticLagrangianFSBetaOptimizer. |
|
|
If enabled, each call to unreference() will also call virtual method onUnreference() Definition at line 115 of file Referenced. References base::Referenced::onUnreferenceEnabled. |
|
|
|
|
|
Definition at line 52 of file ReferencedObject. |
|
|
Called by unreference() if enabled via enableOnUnreferenceCall(true). Typically overridden in subclasses that wish to know about unreference() calls - for example to handle manually breaking cyclic references Reimplemented in robot::control::ControllableAdaptor::AdaptorControlInterface, and robot::control::ControllableAdaptor. Definition at line 121 of file Referenced. Referenced by base::Referenced::unreference(). |
|
||||||||||||
|
optimize the objective with the given constraints
Implements robot::control::kinematics::Optimizer. |
|
|
Increment the reference count by one, indicating that this object has another pointer which is referencing it. Definition at line 65 of file Referenced. References base::Referenced::_refCount. |
|
|
Return the number pointers currently referencing this object. Definition at line 112 of file Referenced. References base::Referenced::_refCount. Referenced by robot::control::ControllableAdaptor::AdaptorControlInterface::onUnreference(). |
|
|
set the gs (Matrix of column vectors that span the full-space)
Implements robot::control::kinematics::LagrangianOptimizer. Definition at line 67 of file AnalyticLagrangianFSBetaOptimizer. References base::Matrix. |
|
|
indicate if a solution is sought in the null-space
Definition at line 70 of file AnalyticLagrangianFSBetaOptimizer. |
|
|
Decrement the reference count by one, indicating that a pointer to this object is referencing it. If the refence count goes to zero, it is assumed that this object is nolonger referenced and is automatically deleted. Definition at line 81 of file Referenced. References base::Referenced::_refCount, Exception, base::Referenced::onUnreference(), and base::Referenced::onUnreferenceEnabled. |
|
|
Definition at line 136 of file Referenced. Referenced by base::Referenced::reference(), base::Referenced::referenceCount(), base::Referenced::Referenced(), base::Referenced::unreference(), and base::Referenced::~Referenced(). |
|
|
Definition at line 80 of file AnalyticLagrangianFSBetaOptimizer. |
|
|
matrix of column vectors that span the solition space of dq's (from a full-space solver)
Definition at line 76 of file AnalyticLagrangianFSBetaOptimizer. Referenced by AnalyticLagrangianFSBetaOptimizer(). |
|
|
Definition at line 77 of file AnalyticLagrangianFSBetaOptimizer. Referenced by AnalyticLagrangianFSBetaOptimizer(). |
|
|
Definition at line 79 of file AnalyticLagrangianFSBetaOptimizer. |
|
|
Definition at line 137 of file Referenced. Referenced by base::Referenced::enableOnUnreferenceCall(), base::Referenced::Referenced(), and base::Referenced::unreference(). |
 1.3.6
1.3.6