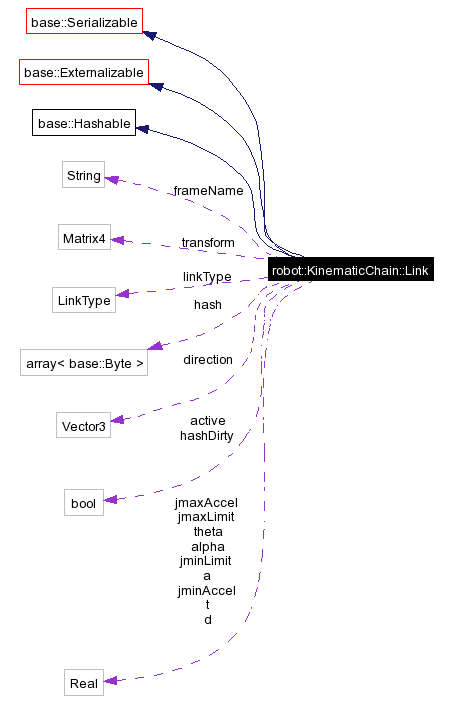
Inheritance diagram for robot::KinematicChain::Link:
Public Types | |
| enum | LinkType { FixedTransform, Prismatic, Revolute, Translating } |
| enum | ExternalizationType { Input = 1, Output = 2, IO = 3 } |
Public Member Functions | |
| Link () | |
| Link (const Link &j) | |
| Link (LinkType type, Real alpha, Real a, Real d, Real theta, Real minLimit=KinematicChain::unboundedMinAngleLimit, Real maxLimit=KinematicChain::unboundedMaxAngleLimit, Real minAccel=0, Real maxAccel=0, bool active=true) | |
| Link (const Vector3 &direction, Real t, Real minLimit=KinematicChain::unboundedMinDistLimit, Real maxLimit=KinematicChain::unboundedMaxDistLimit, Real minAccel=0, Real maxAccel=0, bool active=true) | |
| Link (const Matrix4 &fixedTransform) | |
| ~Link () | |
| virtual String | className () const |
| Link & | operator= (const Link &l) |
| LinkType | type () const |
| bool | isActive () const |
| bool | isDHType () const |
| Int | dof () const |
| the number of degrees-of-freedom present in this link's joint (0 if no joint) | |
| UnitType | dofUnitType (Int dof=0) const |
| Matrix | kinematicTransform (const base::Vector &q) const |
| the forward kinematic transform for this link, with variable parameter values q (dim q must be link.dof()) | |
| Real | getAlpha () const |
| get twist angle (const) (radians) | |
| Real | getA () const |
| get link length (const) | |
| Real | getD () const |
| get distance between links (home pos) | |
| Real | getTheta () const |
| get angle between links (home pos) (radians) | |
| void | setAlpha (Real alpha) |
| void | setA (Real a) |
| void | setD (Real d) |
| void | setTheta (Real theta) |
| Vector3 | getDirection () const |
| get direction along which the joint translates by the variable distance | |
| Real | getT () const |
| get distance to translate along direction (home pos) | |
| void | setDirection (const Vector3 &dir) |
| void | setT (Real t) |
| Matrix4 | getTransform () const |
| FixedTransform links. | |
| void | setTransform (const Matrix4 &transform) |
| Real | variable (Int dof=0) const |
| Real | minLimit (Int dof=0) const |
| Real | maxLimit (Int dof=0) const |
| Real | minAccel (Int dof=0) const |
| Real | maxAccel (Int dof=0) const |
| bool | operator== (const Link &l) const |
| bool | operator!= (const Link &l) const |
| virtual void | serialize (base::Serializer &s) |
| read or write object state to Serializer | |
| virtual bool | formatSupported (const String format, Real version=1.0, ExternalizationType type=IO) const |
| < query if specific format is supported (for input, output or both) | |
| virtual void | externalize (base::Externalizer &e, String format="", Real version=1.0) |
| read or write object state to Externalizer | |
| virtual void | externalize (base::Externalizer &e, String format="", Real version=1.0) const |
| write object state to Externalizer (throws if e is in Input) | |
| virtual base::array< base::Byte > | hashCode () const |
| virtual bool | isSameKindAs (const Object &) const |
| void | load (ref< VFile > archive, const String &format="", Real version=1.0) |
| void | save (ref< VFile > archive, const String &format="", Real version=1.0) |
Static Public Member Functions | |
| template<class BaseClass, class DerivedClass> void | registerSerializableInstantiator (const SerializableInstantiator &instantiator) |
| void | registerSerializableInstantiator (const String &baseClassTypeName, const String &derivedClassTypeName, const SerializableInstantiator &instantiator) |
| template<class BaseClass> const SerializableInstantiator & | getSerializableInstantiator (const String &derivedClassTypeName) |
| const SerializableInstantiator & | getSerializableInstantiator (const String &baseClassTypeName, const String &derivedClassTypeName) |
Protected Member Functions | |
| void | dirtyHash () const |
Protected Attributes | |
| Real | alpha |
| twist angle (const) (radians) | |
| Real | a |
| link length (const) | |
| Real | d |
| distance between links (home pos) | |
| Real | theta |
| angle between links (home pos) (radians) | |
| Vector3 | direction |
| direction along which the joint translates by the variable distance | |
| Real | t |
| distance to translate along direction (home pos) | |
| Matrix4 | transform |
| FixedTransform. | |
| Real | jminLimit |
| Real | jmaxLimit |
| joint limits | |
| Real | jminAccel |
| Real | jmaxAccel |
| joint acceleration limits | |
| LinkType | linkType |
| bool | active |
| an inactive link's joints can't move | |
| String | frameName |
| reference frame name of this link, or "" if unknown/unnamed | |
| bool | hashDirty |
| array< base::Byte > | hash |
Friends | |
| class | KinematicChain |
Definition at line 62 of file KinematicChain.
|
|
Definition at line 40 of file Externalizable. |
|
|
FixedTransform - link described by a 4x4 matrix transform, no joint Prismatic - link with a 1-dof D-H type joint that transltes along the joint z-axis (varies the d parameter) Revolute - link with a 1-dof D-H type joint that rotates about the joint z-axis (varies the theta parameter) Translating - link with a 1-dof joint that translates along the specified direction vector Definition at line 69 of file KinematicChain. Referenced by type(). |
|
|
Definition at line 76 of file KinematicChain. References hashDirty, jmaxAccel, jmaxLimit, jminAccel, jminLimit, linkType, and Revolute. |
|
|
Definition at line 81 of file KinematicChain. References hashDirty, jmaxAccel, jmaxLimit, jminAccel, jminLimit, and linkType. |
|
||||||||||||||||||||||||||||||||||||||||||||
|
Definition at line 86 of file KinematicChain. References dofUnitType(), hashDirty, jmaxAccel, jmaxLimit, jminAccel, jminLimit, linkType, maxLimit(), and minLimit(). |
|
||||||||||||||||||||||||||||||||
|
Definition at line 102 of file KinematicChain. References hashDirty, jmaxAccel, jmaxLimit, jminAccel, jminLimit, linkType, maxLimit(), minLimit(), and Translating. |
|
|
Definition at line 111 of file KinematicChain. References FixedTransform, hashDirty, and linkType. |
|
|
Definition at line 115 of file KinematicChain. |
|
|
return the name of the object's class type. Must be defined by derived classes. Implements base::Object. Definition at line 117 of file KinematicChain. |
|
|
Definition at line 223 of file KinematicChain. References hashDirty. Referenced by serialize(), setA(), setAlpha(), setD(), setDirection(), setT(), setTheta(), and setTransform(). |
|
|
the number of degrees-of-freedom present in this link's joint (0 if no joint)
Definition at line 126 of file KinematicChain. References isDHType(), linkType, and Translating. Referenced by variable(). |
|
|
Definition at line 128 of file KinematicChain. References isDHType(), linkType, and Revolute. Referenced by Link(), and robot::KinematicChain::variableUnitType(). |
|
||||||||||||||||
|
write object state to Externalizer (throws if e is in Input)
Reimplemented from base::Externalizable. Definition at line 192 of file KinematicChain. |
|
||||||||||||||||
|
read or write object state to Externalizer
Implements base::Externalizable. |
|
||||||||||||||||
|
< query if specific format is supported (for input, output or both)
Implements base::Externalizable. Definition at line 189 of file KinematicChain. |
|
|
get link length (const)
Definition at line 136 of file KinematicChain. Referenced by robot::operator<<(). |
|
|
get twist angle (const) (radians)
Definition at line 135 of file KinematicChain. Referenced by robot::operator<<(). |
|
|
get distance between links (home pos)
Definition at line 137 of file KinematicChain. Referenced by robot::operator<<(). |
|
|
get direction along which the joint translates by the variable distance
Definition at line 146 of file KinematicChain. Referenced by robot::operator<<(). |
|
||||||||||||
|
|
|
||||||||||
|
Definition at line 71 of file Serializable. References base::String. |
|
|
get distance to translate along direction (home pos)
Definition at line 147 of file KinematicChain. Referenced by robot::operator<<(). |
|
|
get angle between links (home pos) (radians)
Definition at line 138 of file KinematicChain. Referenced by robot::operator<<(). |
|
|
FixedTransform links.
Definition at line 153 of file KinematicChain. Referenced by robot::operator<<(). |
|
|
Whenever invoked on the same object more than once, the same byte array must be returned, provided no information used in == comparisons on the object is modified. Implements base::Hashable. |
|
|
Definition at line 122 of file KinematicChain. Referenced by robot::operator<<(). |
|
|
Definition at line 123 of file KinematicChain. References linkType, Prismatic, and Revolute. Referenced by dof(), dofUnitType(), and variable(). |
|
|
|
|
|
the forward kinematic transform for this link, with variable parameter values q (dim q must be link.dof())
|
|
||||||||||||||||
|
|
|
|
Definition at line 169 of file KinematicChain. References jmaxAccel. Referenced by robot::KinematicChain::variableMaxAccel(). |
|
|
Definition at line 167 of file KinematicChain. References jmaxLimit. Referenced by Link(), and robot::KinematicChain::variableMaxLimit(). |
|
|
Definition at line 168 of file KinematicChain. References jminAccel. Referenced by robot::KinematicChain::variableMinAccel(). |
|
|
Definition at line 166 of file KinematicChain. References jminLimit. Referenced by Link(), and robot::KinematicChain::variableMinLimit(). |
|
|
Definition at line 172 of file KinematicChain. |
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
||||||||||
|
Definition at line 62 of file Serializable. |
|
||||||||||||||||
|
|
|
|
read or write object state to Serializer
Implements base::Serializable. Definition at line 174 of file KinematicChain. References dirtyHash(), base::Serializer::isInput(), jmaxAccel, jmaxLimit, jminAccel, jminLimit, linkType, and Translating. |
|
|
Definition at line 141 of file KinematicChain. References dirtyHash(). |
|
|
Definition at line 140 of file KinematicChain. References dirtyHash(). |
|
|
Definition at line 142 of file KinematicChain. References dirtyHash(). |
|
|
Definition at line 149 of file KinematicChain. References dirtyHash(). |
|
|
Definition at line 150 of file KinematicChain. References dirtyHash(). |
|
|
Definition at line 143 of file KinematicChain. References dirtyHash(). |
|
|
Definition at line 154 of file KinematicChain. References dirtyHash(). |
|
|
Definition at line 121 of file KinematicChain. References linkType, and LinkType. Referenced by robot::operator<<(). |
|
|
Definition at line 157 of file KinematicChain. References Assert, dof(), Exception, isDHType(), linkType, Revolute, and Translating. |
|
|
Definition at line 225 of file KinematicChain. |
|
|
link length (const)
Definition at line 202 of file KinematicChain. |
|
|
an inactive link's joints can't move
Definition at line 217 of file KinematicChain. |
|
|
twist angle (const) (radians)
Definition at line 201 of file KinematicChain. |
|
|
distance between links (home pos)
Definition at line 203 of file KinematicChain. |
|
|
direction along which the joint translates by the variable distance
Definition at line 207 of file KinematicChain. |
|
|
reference frame name of this link, or "" if unknown/unnamed
Definition at line 219 of file KinematicChain. |
|
|
Definition at line 222 of file KinematicChain. |
|
|
Definition at line 221 of file KinematicChain. Referenced by dirtyHash(), and Link(). |
|
|
joint acceleration limits
Definition at line 214 of file KinematicChain. Referenced by Link(), maxAccel(), and serialize(). |
|
|
joint limits
Definition at line 213 of file KinematicChain. Referenced by Link(), maxLimit(), and serialize(). |
|
|
Definition at line 214 of file KinematicChain. Referenced by Link(), minAccel(), and serialize(). |
|
|
Definition at line 213 of file KinematicChain. Referenced by Link(), minLimit(), and serialize(). |
|
|
Definition at line 216 of file KinematicChain. Referenced by dof(), dofUnitType(), isDHType(), Link(), serialize(), type(), and variable(). |
|
|
distance to translate along direction (home pos)
Definition at line 208 of file KinematicChain. |
|
|
angle between links (home pos) (radians)
Definition at line 204 of file KinematicChain. |
|
|
FixedTransform.
Definition at line 211 of file KinematicChain. |
 1.3.6
1.3.6