Public Member Functions | |
| ODEJoint () | |
| virtual | ~ODEJoint () |
| virtual void | attach (ref< Body > body1, ref< Body > body2) |
| attach this constraint to two bodies | |
| virtual ref< Body > | getBody (Int index) |
| get Body (index is 1 or 2); returns null if unattached | |
| virtual ref< const Body > | getBody (Int index) const |
| virtual void | attachMotor (Int dof, ref< Motor > motor) |
| attach Motor to dof n, or remove if motor==0 | |
| virtual ref< Motor > | getMotor (Int dof) |
| get Motor on dof n, or 0 if none | |
| virtual ref< const Motor > | getMotor (Int dof) const |
| virtual void | setParameter (const String &name, Real value, Int dof=1) |
| virtual bool | isSameKindAs (const ReferencedObject &) const |
| virtual bool | isSameKindAs (const Object &) const |
| virtual String | className () const=0 |
| void | reference () const |
| bool | unreference () const |
| const int | referenceCount () const |
| void | enableOnUnreferenceCall (bool enabled) |
| virtual void | onUnreference () const |
Protected Member Functions | |
| void | checkAddedAndAttached () const |
| virtual bool | hasMotor (Int dof) const=0 |
| implemented by concrete ODEJoint classes to indicate which DOF's can have a Motor attached | |
| virtual void | setMotorTargetVel (Int dof, Real vel)=0 |
| implemented by concrete ODEJoint classes | |
| virtual void | setMotorMaxForce (Int dof, Real force)=0 |
| implemented by concrete ODEJoint classes | |
| virtual void | onConstraintGroupAdd (ref< ConstraintGroup > g)=0 |
| called by ConstraintGroup::addConstraint() | |
| virtual void | setJointID (dJointID jointID) |
Protected Attributes | |
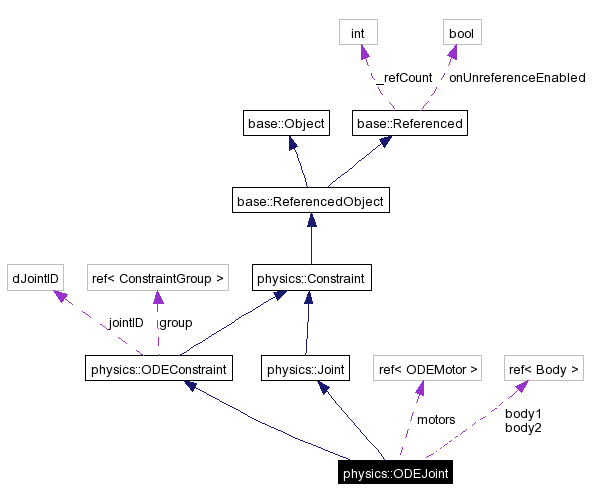
| ref< Body > | body1 |
| ref< Body > | body2 |
| ref< ODEMotor > | motors [6] |
| int | _refCount |
| bool | onUnreferenceEnabled |
| ref< ConstraintGroup > | group |
| dJointID | jointID |
Friends | |
| class | ODEMotor |
| class | ODEConstraintGroup |
|
|
|
|
|
|
|
||||||||||||
|
attach this constraint to two bodies
Implements physics::Joint. |
|
||||||||||||
|
attach Motor to dof n, or remove if motor==0
Implements physics::Joint. |
|
|
Definition at line 53 of file ODEJoint. References Assertm. |
|
|
|
If enabled, each call to unreference() will also call virtual method onUnreference() Definition at line 115 of file Referenced. References base::Referenced::onUnreferenceEnabled. |
|
|
Implements physics::Joint. |
|
|
get Body (index is 1 or 2); returns null if unattached
Implements physics::Joint. |
|
|
Implements physics::Joint. |
|
|
get Motor on dof n, or 0 if none
Implements physics::Joint. |
|
|
implemented by concrete ODEJoint classes to indicate which DOF's can have a Motor attached
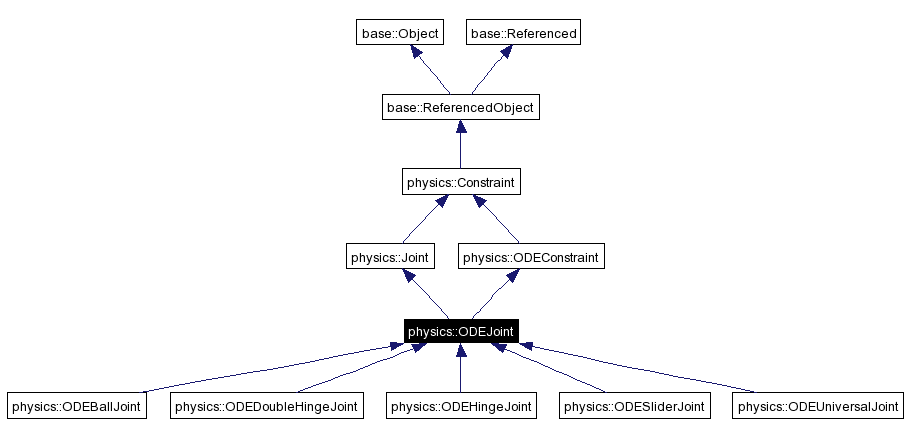
Implemented in physics::ODEBallJoint, physics::ODEDoubleHingeJoint, physics::ODEHingeJoint, physics::ODESliderJoint, and physics::ODEUniversalJoint. |
|
|
|
|
|
Definition at line 52 of file ReferencedObject. |
|
|
|
Called by unreference() if enabled via enableOnUnreferenceCall(true). Typically overridden in subclasses that wish to know about unreference() calls - for example to handle manually breaking cyclic references Reimplemented in robot::control::ControllableAdaptor::AdaptorControlInterface, and robot::control::ControllableAdaptor. Definition at line 121 of file Referenced. Referenced by base::Referenced::unreference(). |
|
|
Increment the reference count by one, indicating that this object has another pointer which is referencing it. Definition at line 65 of file Referenced. References base::Referenced::_refCount. |
|
|
Return the number pointers currently referencing this object. Definition at line 112 of file Referenced. References base::Referenced::_refCount. Referenced by robot::control::ControllableAdaptor::AdaptorControlInterface::onUnreference(). |
|
|
Definition at line 45 of file ODEConstraint. |
|
||||||||||||
|
implemented by concrete ODEJoint classes
Implemented in physics::ODEBallJoint, physics::ODEDoubleHingeJoint, physics::ODEHingeJoint, physics::ODESliderJoint, and physics::ODEUniversalJoint. |
|
||||||||||||
|
implemented by concrete ODEJoint classes
Implemented in physics::ODEBallJoint, physics::ODEDoubleHingeJoint, physics::ODEHingeJoint, physics::ODESliderJoint, and physics::ODEUniversalJoint. |
|
||||||||||||||||
|
Reimplemented in physics::ContactConstraint, physics::FixedConstraint, physics::ODEContactConstraint, physics::ODEDoubleHingeJoint, physics::ODEFixedConstraint, physics::ODEHingeJoint, and physics::ODESliderJoint. Definition at line 42 of file Constraint. References Exception. |
|
|
Decrement the reference count by one, indicating that a pointer to this object is referencing it. If the refence count goes to zero, it is assumed that this object is nolonger referenced and is automatically deleted. Definition at line 81 of file Referenced. References base::Referenced::_refCount, Exception, base::Referenced::onUnreference(), and base::Referenced::onUnreferenceEnabled. |
|
|
Definition at line 51 of file ODEConstraint. |
|
|
|
|
|
Definition at line 136 of file Referenced. Referenced by base::Referenced::reference(), base::Referenced::referenceCount(), base::Referenced::Referenced(), base::Referenced::unreference(), and base::Referenced::~Referenced(). |
|
|
|
|
|
|
|
|
Definition at line 48 of file ODEConstraint. |
|
|
Definition at line 49 of file ODEConstraint. |
|
|
|
|
|
Definition at line 137 of file Referenced. Referenced by base::Referenced::enableOnUnreferenceCall(), base::Referenced::Referenced(), and base::Referenced::unreference(). |
 1.3.6
1.3.6