Public Member Functions | |
| Motor () | |
| virtual | ~Motor () |
| virtual void | setTargetVel (Real vel)=0 |
| target linear or angular velocity | |
| virtual void | setMaxForce (Real force)=0 |
| limit on applied force or torque | |
| virtual ref< Joint > | getJoint ()=0 |
| Joint which Motor drives. | |
| virtual void | setParameter (const String &name, Real value) |
| virtual bool | isSameKindAs (const ReferencedObject &) const |
| virtual bool | isSameKindAs (const Object &) const |
| virtual String | className () const=0 |
| void | reference () const |
| bool | unreference () const |
| const int | referenceCount () const |
| void | enableOnUnreferenceCall (bool enabled) |
| virtual void | onUnreference () const |
Protected Attributes | |
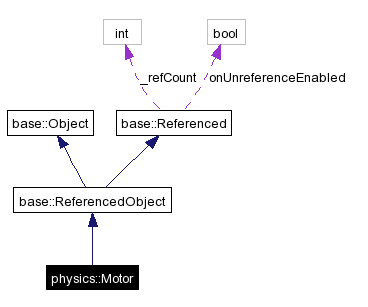
| int | _refCount |
| bool | onUnreferenceEnabled |
|
|
|
|
|
|
|
|
|
If enabled, each call to unreference() will also call virtual method onUnreference() Definition at line 115 of file Referenced. References base::Referenced::onUnreferenceEnabled. |
|
|
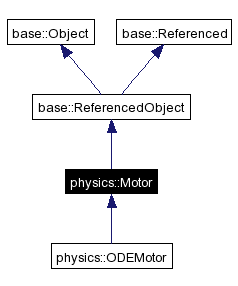
Implemented in physics::ODEMotor. |
|
|
|
|
|
Definition at line 52 of file ReferencedObject. |
|
|
Called by unreference() if enabled via enableOnUnreferenceCall(true). Typically overridden in subclasses that wish to know about unreference() calls - for example to handle manually breaking cyclic references Reimplemented in robot::control::ControllableAdaptor::AdaptorControlInterface, and robot::control::ControllableAdaptor. Definition at line 121 of file Referenced. Referenced by base::Referenced::unreference(). |
|
|
Increment the reference count by one, indicating that this object has another pointer which is referencing it. Definition at line 65 of file Referenced. References base::Referenced::_refCount. |
|
|
Return the number pointers currently referencing this object. Definition at line 112 of file Referenced. References base::Referenced::_refCount. Referenced by robot::control::ControllableAdaptor::AdaptorControlInterface::onUnreference(). |
|
|
limit on applied force or torque
Implemented in physics::ODEMotor. |
|
||||||||||||
|
Reimplemented in physics::ODEMotor. Definition at line 46 of file Motor. References Exception. |
|
|
target linear or angular velocity
Implemented in physics::ODEMotor. |
|
|
Decrement the reference count by one, indicating that a pointer to this object is referencing it. If the refence count goes to zero, it is assumed that this object is nolonger referenced and is automatically deleted. Definition at line 81 of file Referenced. References base::Referenced::_refCount, Exception, base::Referenced::onUnreference(), and base::Referenced::onUnreferenceEnabled. |
|
|
Definition at line 136 of file Referenced. Referenced by base::Referenced::reference(), base::Referenced::referenceCount(), base::Referenced::Referenced(), base::Referenced::unreference(), and base::Referenced::~Referenced(). |
|
|
Definition at line 137 of file Referenced. Referenced by base::Referenced::enableOnUnreferenceCall(), base::Referenced::Referenced(), and base::Referenced::unreference(). |
 1.3.6
1.3.6