Public Member Functions | |
| virtual void | setControlInterface (ref< ControlInterface > controlInterface)=0 |
| virtual bool | isConnected () const |
| virtual bool | iterate (const base::Time &time)=0 |
| virtual bool | isSameKindAs (const ReferencedObject &) const |
| virtual bool | isSameKindAs (const Object &) const |
| virtual String | className () const=0 |
| void | reference () const |
| bool | unreference () const |
| const int | referenceCount () const |
| void | enableOnUnreferenceCall (bool enabled) |
| virtual void | onUnreference () const |
Protected Attributes | |
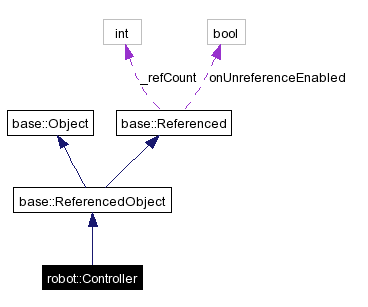
| int | _refCount |
| bool | onUnreferenceEnabled |
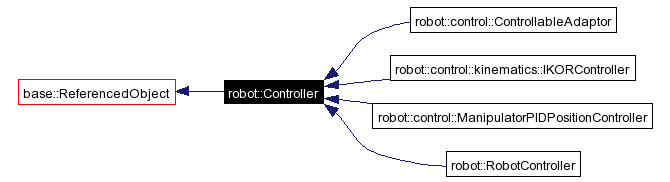
Definition at line 41 of file Controller.
|
|
|
If enabled, each call to unreference() will also call virtual method onUnreference() Definition at line 115 of file Referenced. References base::Referenced::onUnreferenceEnabled. |
|
|
Query if the Controller has been passed all the ControlInterfaces it needs via setControlInterface() Reimplemented in robot::control::ControllableAdaptor, robot::control::kinematics::IKORController, and robot::control::ManipulatorPIDPositionController. Definition at line 54 of file Controller. |
|
|
|
|
|
Definition at line 52 of file ReferencedObject. |
|
|
Execute an iteration of the control loop. returns true if it wants to quit the loop - however this may be ignored by the user/caller. Implemented in robot::control::ControllableAdaptor, robot::control::kinematics::IKORController, and robot::control::ManipulatorPIDPositionController. |
|
|
Called by unreference() if enabled via enableOnUnreferenceCall(true). Typically overridden in subclasses that wish to know about unreference() calls - for example to handle manually breaking cyclic references Reimplemented in robot::control::ControllableAdaptor::AdaptorControlInterface, and robot::control::ControllableAdaptor. Definition at line 121 of file Referenced. Referenced by base::Referenced::unreference(). |
|
|
Increment the reference count by one, indicating that this object has another pointer which is referencing it. Definition at line 65 of file Referenced. References base::Referenced::_refCount. |
|
|
Return the number pointers currently referencing this object. Definition at line 112 of file Referenced. References base::Referenced::_refCount. Referenced by robot::control::ControllableAdaptor::AdaptorControlInterface::onUnreference(). |
|
|
Provide ControlInterface through which Controller may control. Can be called multiple times to pass multiple ControlInterfaces. Unknown ControlInterface types will be ignored. Implemented in robot::control::ControllableAdaptor, robot::control::kinematics::IKORController, and robot::control::ManipulatorPIDPositionController. Referenced by robot::RobotController::RobotController(). |
|
|
Decrement the reference count by one, indicating that a pointer to this object is referencing it. If the refence count goes to zero, it is assumed that this object is nolonger referenced and is automatically deleted. Definition at line 81 of file Referenced. References base::Referenced::_refCount, Exception, base::Referenced::onUnreference(), and base::Referenced::onUnreferenceEnabled. |
|
|
Definition at line 136 of file Referenced. Referenced by base::Referenced::reference(), base::Referenced::referenceCount(), base::Referenced::Referenced(), base::Referenced::unreference(), and base::Referenced::~Referenced(). |
|
|
Definition at line 137 of file Referenced. Referenced by base::Referenced::enableOnUnreferenceCall(), base::Referenced::Referenced(), and base::Referenced::unreference(). |
 1.3.6
1.3.6