Public Member Functions | |
| Named () | |
| Named (const String &name) | |
| Named (const Named &n) | |
| virtual | ~Named () |
| virtual Named & | operator= (const Named &n) |
| virtual const String & | getName () const |
Protected Member Functions | |
| virtual void | setName (const String &name) |
|
|
|
|
|
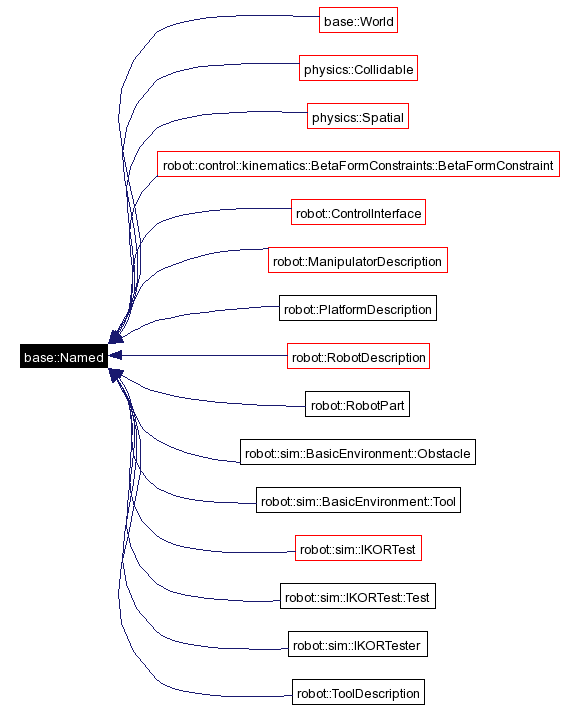
Definition at line 38 of file Named. References base::String. |
|
|
|
|
|
|
|
|
Definition at line 44 of file Named. References base::String. Referenced by physics::Collidable::findNamed(), physics::operator<<(), robot::ToolDescription::operator=(), robot::RobotDescription::operator=(), robot::PlatformDescription::operator=(), robot::ManipulatorDescription::operator=(), operator=(), and robot::ManipulatorDescription::operator==(). |
|
|
|
|
 1.3.6
1.3.6