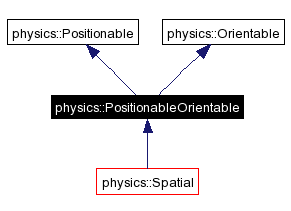
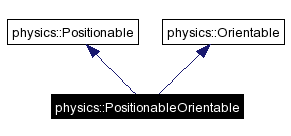
Inheritance diagram for physics::PositionableOrientable:
Public Member Functions | |
| PositionableOrientable () | |
| PositionableOrientable (const PositionableOrientable &po) | |
| virtual PositionableOrientable & | operator= (const PositionableOrientable &po) |
| virtual void | setPositionOrientation (const Point3 &pos, const Orient &orient) |
| virtual void | setConfiguration (const base::Transform &configuration) |
| virtual base::Transform | getConfiguration () const |
| virtual void | setPosition2D (const base::Point2 &p, Real theta) |
| set the 2D (x,y,theta) position (theta is rot. angle about Z-axis) | |
| virtual base::Point2 | getPosition2D () const |
| get the 2D (x,y) position | |
| Real | getOrientation2D () const |
| get the 2D angle theta (rot. angle about Z-axis) | |
| virtual void | setPosition (const Point3 &pos)=0 |
| virtual Point3 | getPosition () const=0 |
| virtual void | setOrientation (const Orient &orient)=0 |
| virtual Orient | getOrientation () const=0 |
Definition at line 40 of file PositionableOrientable.
|
|
Definition at line 43 of file PositionableOrientable. |
|
|
Definition at line 44 of file PositionableOrientable. References getConfiguration(), and setConfiguration(). |
|
|
Reimplemented in physics::SpatialTransform, robot::sim::SimulatedPlatform, robot::sim::SimulatedRobot, robot::sim::SimulatedSerialManipulator, and robot::sim::SimulatedTool. Definition at line 60 of file PositionableOrientable. References physics::Orientable::getOrientation(), and physics::Positionable::getPosition(). Referenced by physics::CollidableBody::getBoundingBox(), physics::DynamicSpatial::getGlobalPointRelPos(), physics::DynamicSpatial::getRelPointPos(), operator=(), and PositionableOrientable(). |
|
|
|
get the 2D angle theta (rot. angle about Z-axis)
|
|
|
|
get the 2D (x,y) position
Definition at line 72 of file PositionableOrientable. References physics::Positionable::getPosition(), base::Point2, base::Point3, base::Vector3::x, and base::Vector3::y. |
|
|
Definition at line 46 of file PositionableOrientable. References getConfiguration(), and setConfiguration(). |
|
|
Reimplemented in physics::SpatialGroup, physics::SpatialTransform, robot::sim::SimulatedPlatform, robot::sim::SimulatedRobot, robot::sim::SimulatedSerialManipulator, and robot::sim::SimulatedTool. Definition at line 53 of file PositionableOrientable. References base::Transform::getRotation(), base::Transform::getTranslation(), physics::Orientable::setOrientation(), and physics::Positionable::setPosition(). Referenced by operator=(), PositionableOrientable(), and setPositionOrientation(). |
|
|
|
||||||||||||
|
set the 2D (x,y,theta) position (theta is rot. angle about Z-axis)
|
|
||||||||||||
|
Definition at line 48 of file PositionableOrientable. References base::Point3, and setConfiguration(). |
 1.3.6
1.3.6