Public Member Functions | |
| Quat4 () | |
| Quat4 (const Quat4 &q) | |
| Quat4 (const Vector3 &v) | |
| Quat4 (const Vector4 &v) | |
| Quat4 (const Real &s) | |
| Quat4 (Real x, Real y, Real z, Real w) | |
| Quat4 (const Vector3 &axis, Real angle) | |
| ~Quat4 () | |
| void | setIdentity () throw () |
| void | setZero () throw () |
| Real & | e (Int i) throw () |
| const Real & | e (Int i) const throw () |
| Real & | at (Int i) throw (std::out_of_range) |
| const Real & | at (Int i) const throw (std::out_of_range) |
| Real & | operator[] (Int i) |
| const Real & | operator[] (Int i) const |
| Quat4 & | operator= (const Quat4 &src) throw () |
| bool | operator== (const Quat4 &q) const throw () |
| bool | equals (const Quat4 &q) const throw () |
| Real | norm () const throw () |
| Quat4 & | normalize () throw () |
| Quat4 & | conjugate () |
| Quat4 & | invert () throw () |
| Quat4 & | operator *= (const Quat4 &qr) |
| Quat4 & | operator *= (Real s) |
| Quat4 & | operator/= (Real s) |
| Quat4 & | operator+= (const Quat4 &q) |
| Quat4 & | operator-= (const Quat4 &q) |
| Quat4 & | negate () throw () |
| void | setRotation (const Matrix4 &rotation) |
| Generate quat corresponding to rotation component of matrix. | |
| void | setRotation (const Vector3 &axis, Real angle) |
| void | getRotation (Vector3 &axis, Real &angle) const |
| void | rotatePoint (Point4 &p) const |
| void | rotatePoint (Point3 &p) const |
| Point3 | rotate (const Point3 &p) const |
| Point4 | rotate (const Point4 &p) const |
| operator Matrix4 () const | |
| convert to corresponding rotation matrix | |
| Real * | c_array () |
| void | serialize (Serializer &s) |
| read or write object state to Serializer | |
Static Public Member Functions | |
| Quat4 | interpolate (const Quat4 &from, const Quat4 &to, Real t) |
| interpolate between from-to an amount t:[0..1] using SLERP | |
| Real | angleBetween (const Quat4 &q1, const Quat4 &q2) |
| angle seperating the orientations q1 & q2 | |
Public Attributes | |
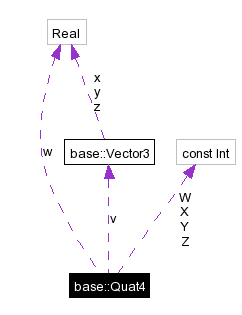
| Vector3 | v |
| Real | w |
Static Public Attributes | |
| const Int | X = 1 |
| const Int | Y = 2 |
| const Int | Z = 3 |
| const Int | W = 4 |
Friends | |
| std::ostream & | operator<< (std::ostream &, const Quat4 &) |
Definition at line 51 of file Quat4.
|
|
Definition at line 55 of file Quat4. References setIdentity(). |
|
|
Definition at line 56 of file Quat4. References operator=(). |
|
|
Definition at line 57 of file Quat4. References base::Real, and w. |
|
|
Definition at line 58 of file Quat4. References w. |
|
|
Definition at line 59 of file Quat4. References base::Real, and w. |
|
||||||||||||||||||||
|
Definition at line 60 of file Quat4. References base::Real. |
|
||||||||||||
|
Definition at line 61 of file Quat4. References base::Real, and setRotation(). |
|
|
|
|
||||||||||||
|
angle seperating the orientations q1 & q2
|
|
|
Definition at line 106 of file Quat4. References base::Vector3::e(), Exception, base::Int, base::Real, and w. |
|
|
Definition at line 98 of file Quat4. References base::Vector3::e(), Exception, base::Int, base::Real, and w. |
|
|
Definition at line 198 of file Quat4. References base::Real, and base::Vector3::x. |
|
|
Definition at line 157 of file Quat4. References base::Vector3::negate(). Referenced by base::conjugate(), and invert(). |
|
|
Definition at line 89 of file Quat4. References base::Vector3::e(), Exception, base::Int, base::Real, and w. |
|
|
Definition at line 80 of file Quat4. References base::Vector3::e(), Exception, base::Int, base::Real, and w. Referenced by operator[](). |
|
|
Definition at line 135 of file Quat4. References base::equals(), base::Vector3::equals(), and w. |
|
||||||||||||
|
|
|
||||||||||||||||
|
interpolate between from-to an amount t:[0..1] using SLERP
|
|
|
Definition at line 159 of file Quat4. References conjugate(), base::equals(), norm(), and base::Real. Referenced by base::inverse(). |
|
|
Definition at line 178 of file Quat4. References base::Vector3::negate(), and w. Referenced by base::operator-(). |
|
|
Definition at line 142 of file Quat4. References base::Real, w, base::Vector3::x, base::Vector3::y, and base::Vector3::z. Referenced by invert(), and normalize(). |
|
|
Definition at line 145 of file Quat4. References base::equals(), norm(), base::Real, base::sqrt(), and w. |
|
|
Definition at line 173 of file Quat4. References base::Real, and w. |
|
|
|
|
|
convert to corresponding rotation matrix
|
|
|
|
|
|
|
|
|
Definition at line 174 of file Quat4. References base::Real, and w. |
|
|
Definition at line 120 of file Quat4. References w. Referenced by Quat4(). |
|
|
Definition at line 128 of file Quat4. References w. |
|
|
Definition at line 117 of file Quat4. References e(), base::Int, and base::Real. |
|
|
Definition at line 114 of file Quat4. References e(), base::Int, and base::Real. |
|
|
Definition at line 190 of file Quat4. References base::Point4, and rotatePoint(). |
|
|
Definition at line 188 of file Quat4. References base::Point3, base::Point4, rotatePoint(), base::Vector4::x, base::Vector4::y, and base::Vector4::z. Referenced by base::Orient::rotate(). |
|
|
Definition at line 186 of file Quat4. References base::Point3, base::Point4, rotatePoint(), base::Vector4::w, base::Vector4::x, base::Vector4::y, and base::Vector4::z. |
|
|
Referenced by rotate(), base::LineSegPathRep::rotate(), rotatePoint(), and base::Orient::rotatePoint(). |
|
|
read or write object state to Serializer
Referenced by base::Serializer::operator()(). |
|
|
Definition at line 69 of file Quat4. References base::Real, w, base::Vector3::x, base::Vector3::y, and base::Vector3::z. |
|
||||||||||||
|
|
|
|
Generate quat corresponding to rotation component of matrix.
Referenced by Quat4(), and base::LineSegPathRep::transform(). |
|
|
Definition at line 74 of file Quat4. References base::Real, setIdentity(), and w. |
|
||||||||||||
|
|
|
|
Definition at line 202 of file Quat4. Referenced by operator+=(), operator-=(), base::operator<<(), and base::Orient::operator=(). |
|
|
Definition at line 203 of file Quat4. Referenced by at(), e(), equals(), negate(), norm(), normalize(), operator *=(), operator+=(), operator-=(), operator/=(), base::operator<<(), operator=(), base::Orient::operator=(), operator==(), Quat4(), setIdentity(), and setZero(). |
|
|
|
|
|
|
|
|
|
|
|
|
 1.3.6
1.3.6