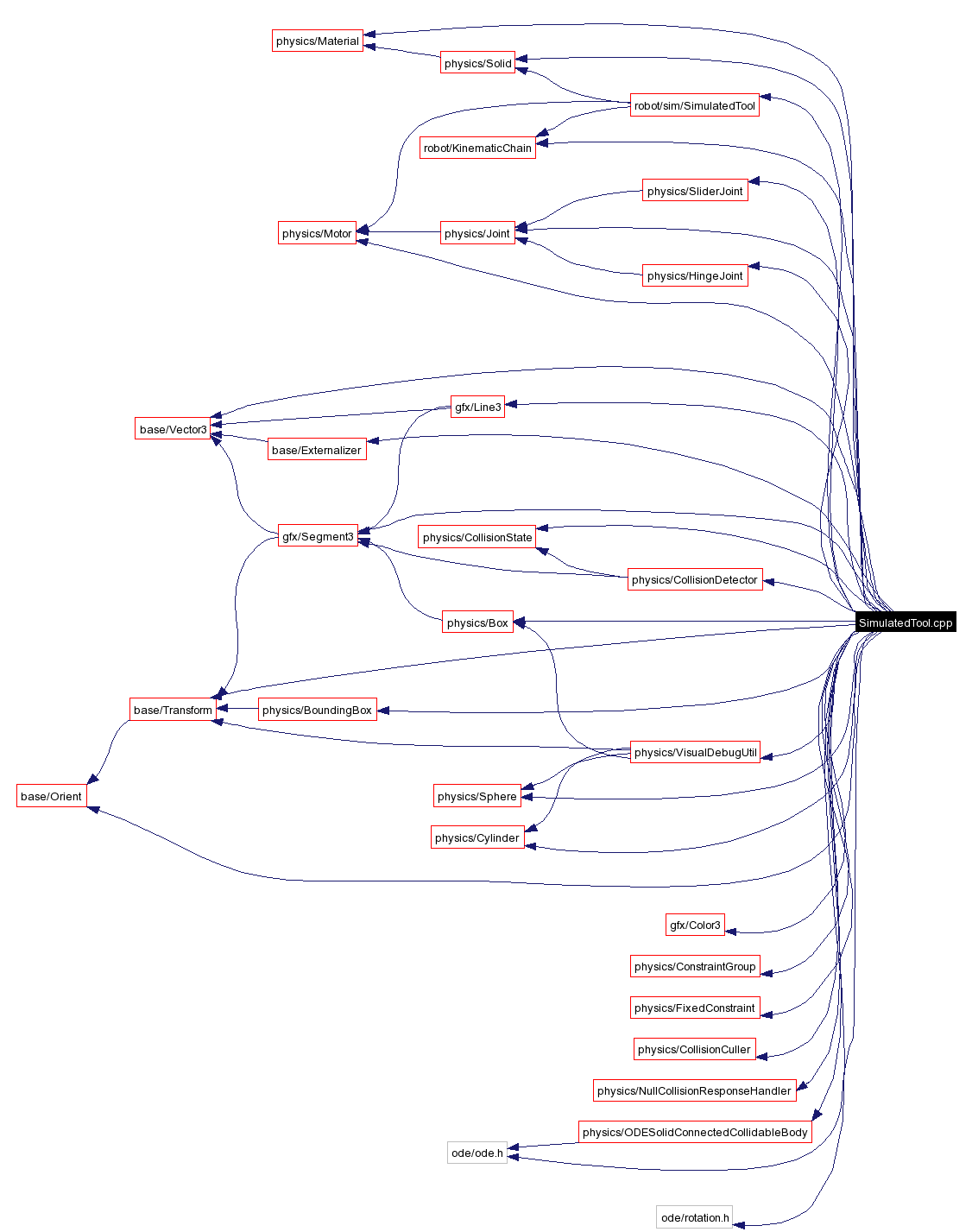
#include <robot/sim/SimulatedTool>#include <base/Vector3>#include <base/Orient>#include <base/Transform>#include <base/Externalizer>#include <gfx/Color3>#include <gfx/Line3>#include <gfx/Segment3>#include <physics/BoundingBox>#include <physics/Material>#include <physics/Box>#include <physics/Sphere>#include <physics/Cylinder>#include <physics/Solid>#include <physics/ConstraintGroup>#include <physics/FixedConstraint>#include <physics/Joint>#include <physics/HingeJoint>#include <physics/SliderJoint>#include <physics/Motor>#include <physics/CollisionCuller>#include <physics/CollisionDetector>#include <physics/CollisionState>#include <physics/NullCollisionResponseHandler>#include <physics/VisualDebugUtil>#include <robot/KinematicChain>#include <physics/ODESolidConnectedCollidableBody>#include <ode/ode.h>#include <ode/rotation.h>Include dependency graph for SimulatedTool.cpp:
Go to the source code of this file.
 1.3.6
1.3.6