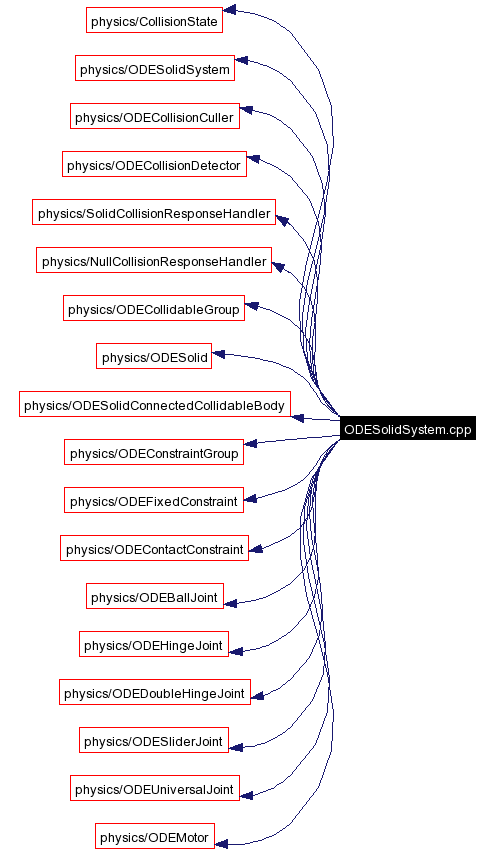
#include <physics/CollisionState>#include <physics/ODESolidSystem>#include <physics/ODECollisionCuller>#include <physics/ODECollisionDetector>#include <physics/SolidCollisionResponseHandler>#include <physics/NullCollisionResponseHandler>#include <physics/ODECollidableGroup>#include <physics/ODESolid>#include <physics/ODESolidConnectedCollidableBody>#include <physics/ODEConstraintGroup>#include <physics/ODEFixedConstraint>#include <physics/ODEContactConstraint>#include <physics/ODEBallJoint>#include <physics/ODEHingeJoint>#include <physics/ODEDoubleHingeJoint>#include <physics/ODESliderJoint>#include <physics/ODEUniversalJoint>#include <physics/ODEMotor>Include dependency graph for ODESolidSystem.cpp:
Go to the source code of this file.
 1.3.6
1.3.6