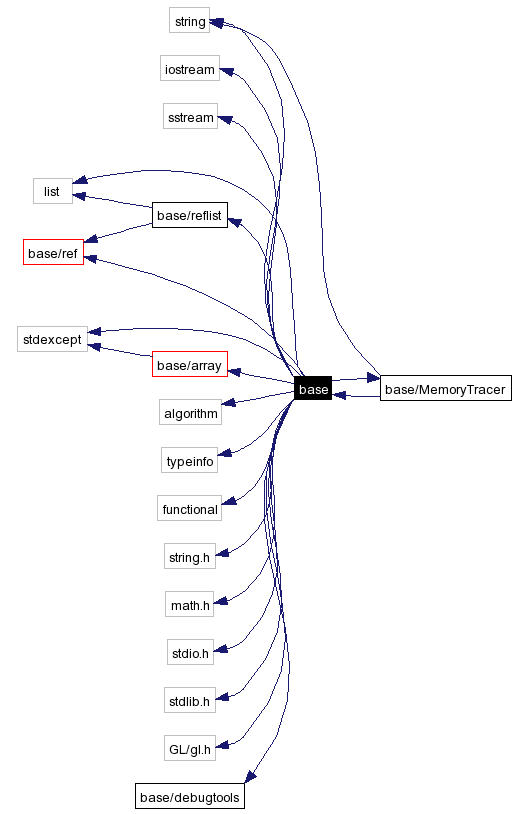
#include <iostream>#include <string>#include <sstream>#include <list>#include <stdexcept>#include <algorithm>#include <typeinfo>#include <functional>#include <base/reflist>#include <string.h>#include <math.h>#include <stdio.h>#include <stdlib.h>#include <GL/gl.h>#include <base/MemoryTracer>#include <base/debugtools>#include <base/array>#include <base/ref>Include dependency graph for base:
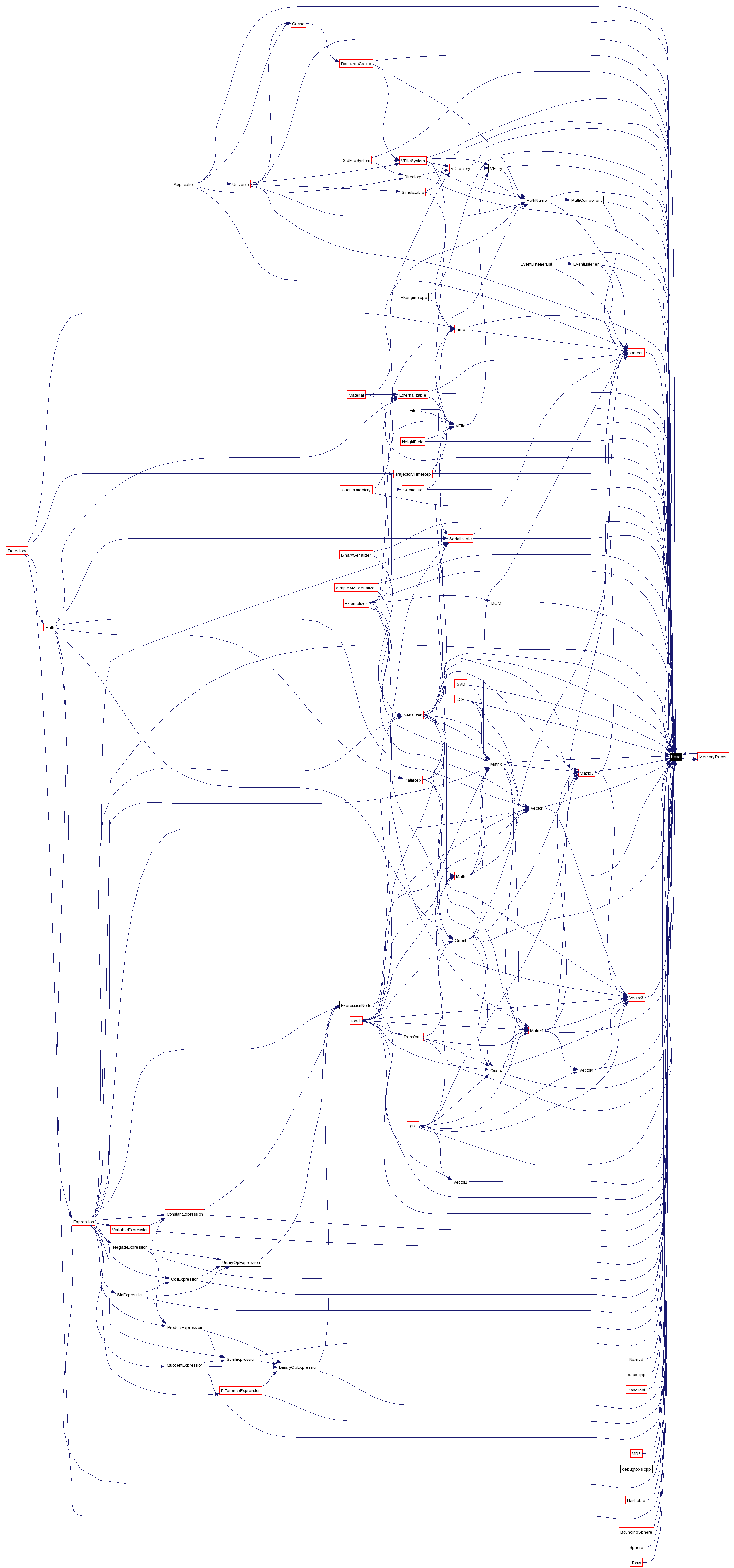
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | base |
Defines | |
| #define | USE_OSG |
| #define | _LOG_CALLER_NAME base::className(typeid(*this)) << "::" << __func__ << " -- " |
| #define | Log(o) { base::_Log << _LOG_CALLER_NAME << o; } |
| #define | Logln(o) { base::_Log << _LOG_CALLER_NAME << o << "\n"; } |
| #define | Logc(o) { base::_Log << o; } |
| #define | Logcln(o) { base::_Log << o << "\n"; } |
| #define | Logf(o) { base::_Log << __func__ << " -- " << o; } |
| #define | Logfln(o) { base::_Log << __func__ << " -- " << o << "\n"; } |
| #define | Logfc(o) Logc(o) |
| #define | Logfcln(o) Logcln(o) |
| #define | Console(o) { base::_Console << o; } |
| #define | Consoleln(o) { base::_Console << o << std::endl; } |
| #define | abortOnAssertionFailureEnabled(e) |
| #define | exceptionOutputEnabled(e) |
| #define | abortOnExceptionConstructionEnabled(e) |
| #define | Exception(o) String(String("exception thrown: ")+String(base::className(typeid(*this)))+"::"+String(__func__)+":\n - "+String(o)) |
| #define | Exceptionf(o) String(String("exception thrown: ")+String(__func__)+":\n - "+String(o)) |
| #define | Assertion(o) String(String("assertion failed: ")+String(base::className(typeid(*this)))+"::"+String(__func__)+" - "+String(o)) |
| #define | Assertionf(o) String(String("assertion failed: ")+String(__func__)+" - "+String(o)) |
| #define | Assert(a) |
| #define | Assertf(a) |
| #define | Assertm(a, s) |
| #define | Assertmf(a, s) |
| #define | Assertifm(f, a, s) Assertm(!f || a,s) |
| #define | Assertifmf(f, a, s) Assertmf(!f || a,s) |
| #define | instanceof(var, type) (dynamic_cast<type*>(&var) != 0) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Definition at line 410 of file base. Referenced by base::Serializer::baseRef(), physics::CollisionResponseHandler::collide(), and base::Serializer::operator()(). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Definition at line 292 of file base. Referenced by stressTestAllocator(). |
|
|
Definition at line 287 of file base. Referenced by gfx::Visual::createOSGVisual(), and demeter::DemeterDrawable::setUseDisplayList(). |
|
|
|
 1.3.6
1.3.6