Public Attributes | |
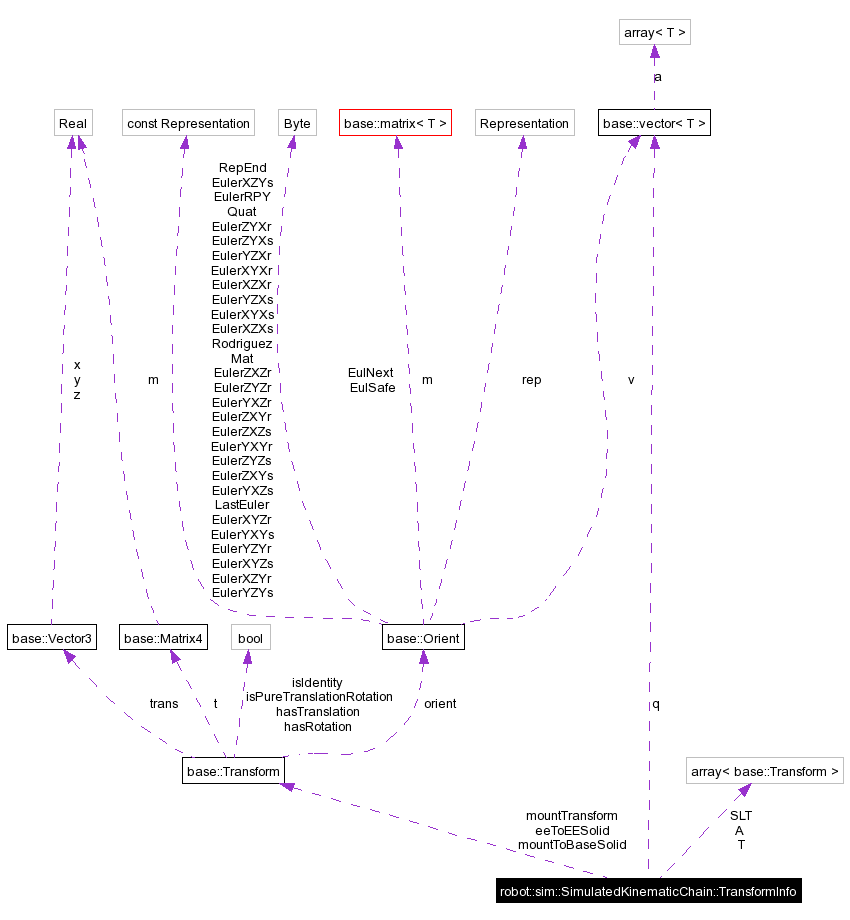
| base::Transform | mountTransform |
| transform from mount point to world frame | |
| array< base::Transform > | A |
| transform from link l frame into link l-1 frame | |
| array< base::Transform > | T |
| accumulated transformations for each link (transforms from link l frame to mount frame) | |
| array< base::Transform > | SLT |
| relative configuration of link's Solid from its origin | |
| base::Vector | q |
| joint variable parameter value at which A,T,ST were evaluated | |
| base::Transform | mountToBaseSolid |
| transform from mount frame to base Solid frame | |
| base::Transform | eeToEESolid |
| transform from ee frame to ee Solid frame | |
|
|
transform from link l frame into link l-1 frame
Definition at line 125 of file SimulatedKinematicChain. |
|
|
transform from ee frame to ee Solid frame
Definition at line 130 of file SimulatedKinematicChain. |
|
|
transform from mount frame to base Solid frame
Definition at line 129 of file SimulatedKinematicChain. |
|
|
transform from mount point to world frame
Definition at line 124 of file SimulatedKinematicChain. |
|
|
joint variable parameter value at which A,T,ST were evaluated
Definition at line 128 of file SimulatedKinematicChain. |
|
|
relative configuration of link's Solid from its origin
Definition at line 127 of file SimulatedKinematicChain. |
|
|
accumulated transformations for each link (transforms from link l frame to mount frame)
Definition at line 126 of file SimulatedKinematicChain. |
 1.3.6
1.3.6