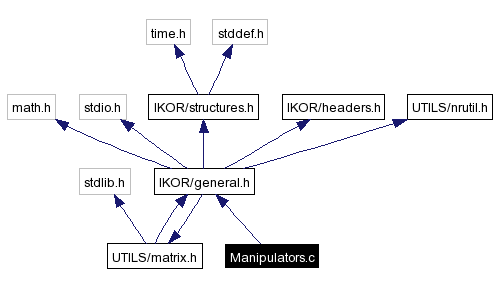
#include <IKOR/general.h>Include dependency graph for Manipulators.c:
Go to the source code of this file.
Functions | |
| int | go_next (FILE *ARM) |
| int | rm_blanks (FILE *ARM) |
| void | init_ARM () |
|
|
Definition at line 39 of file Manipulators.c. References FATAL, and IKerror(). Referenced by init_ARM(). |
|
|
Definition at line 86 of file Manipulators.c. References Platform::ANG_OFF, Manipulator_struct::Angles, ARM_file, DEBUG, EExaxis, EEyaxis, EEzaxis, Platform::Exist, FALSE, FATAL, go_next(), Platform::Holonomic, ANGLE::Home, IKerror(), Platform::L_OFF, Platform::Length, Manipulator_struct::LINKS, LL, mat_malloc(), ANGLE::Max_limit, ANGLE::Min_limit, Manipulator_struct::NA, Manipulator_struct::NL, MATRIX::p, PI, Manipulator_struct::PLAT, ANGLE::Prism, rm_blanks(), Robot, Platform::Thick, TRUE, Manipulator_struct::Weights, Platform::Width, and Platform::Z_OFF. Referenced by Init_Globals(). |
|
|
Definition at line 62 of file Manipulators.c. References FATAL, and IKerror(). Referenced by init_ARM(). |
 1.3.6
1.3.6